V
主页
四足机器人学习爬梯子|2024【苏黎世联邦理工学院】
发布人
四足机器人学习爬梯子|2024【苏黎世联邦理工学院】 Vogel, Dylan, Robert Baines, Joseph Church, Julian Lotzer, Karl Werner, and Marco Hutter. "Robust Ladder Climbing with a Quadrupedal Robot." arXiv preprint arXiv:2409.17731 (2024). https://arxiv.org/abs/2409.17731 https://www.youtube.com/watch?v=_N2mmcxINmo
打开封面
下载高清视频
观看高清视频
视频下载器
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
两轮跳跃机器人「Ascento」2020【苏黎世联邦理工学院】
Ascento Pro专业版|2021【苏黎世联邦理工学院】
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
四足机器人复制动物运动方式|2022 IROS【苏黎世联邦理工】
SEER:模拟情绪表达机器人|2018【東京大学】
BIOIC线驱软连续机器人|2022【德国弗劳恩霍夫研究所】
无人机学习在空中用机械手开门|2023【苏黎世联邦理工学院】
复合凸轮从动机构【SIGGRAPH Asia 2021】
扑翼机如何自主栖息在树枝上|2022【瑞士洛桑联邦理工学院】
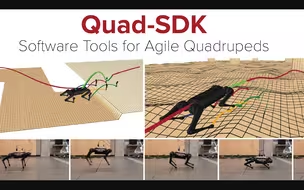
开源敏捷四足机器人运动软件框架Quad-SDK|2022 ICRA【卡内基梅隆大学】
仿生机器人女友它水灵灵的来了
开源仿生机器腿|2021【密歇根大学】
四足机器人从视觉学习地形物理参数|2024【苏黎世联邦理工学院】
人形机器人:自监督学习的傅里叶潜在动力学|2024【MIT】
Magnecko;机器人像蜘蛛侠一样爬墙和天花板|2023【苏黎世联邦理工学院】
准备爬行「3D打印爬行机器人」|2016【東京大学】
国产大尺寸仿鸵双足机器人 “大圣”|2023【五八智能科技(杭州)】
Ascento Guard:安全巡逻机器人|2023【苏黎世联邦理工学院】
自然智能:机器人监测栖息地|2022【苏黎世联邦理工】
为工作而生「人形机器人」digit|2021【 Agility Robotics】
birdbot:一种高效节能的机器人腿|2022|Science Robotics【德国马克斯·普朗克研究所】
机器人运动扩散模型:机器人角色的运动生成|2024【迪斯尼】
蜘蛛启发的电液软驱动关节|2021【马克斯普朗克智能系统研究所】
WoCoCo:通过顺序接触学习全身人形机器人控制|2024【卡内基·梅隆大学】
自动布肌肉纤维「软体机器人」|2020【迪士尼Disney】
灵巧手遥操作
可穿戴肌肉Myoshirt:上肢日常生活辅助|2022【苏黎世联邦理工学院】
宇树G1人形机器人:¥9.9万元起|2024【宇树】
用于现实世界行走的个性化外骨骼|2021|哈佛大学【Science Robotics】
垂直农业:塔式自动化农场的7优势|2022【农艺学Agrotonomy】
催眠控制帅哥变成机器人
Figure:通用人工智能类人机器人|2023【Figure】
移动机器人的未来「Swiss-Mile」2021【苏黎世联邦理工学院】
MIT赵选贺讲座:磁性软体机器人【AIM2020 Workshop】
学习轮腿机器人的鲁棒自主导航和运动|2024|Science Robotics【苏黎世联邦理工学院】
ElectroVoxel:模块化自重构机器人|2022【MIT】
多臂有效载荷操作-混合现实|2022【苏黎世联邦理工学院】
SMUG Planner:挑战环境中的多目标规划器|2024【苏黎世联邦理工】
Vision 60会游泳的两栖机械狗:背步枪上山下水?|2022【美国Ghost Robotics】