V
主页
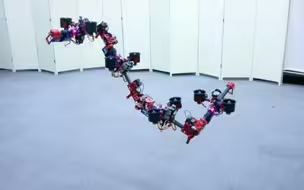
被动动态双足行走:迈向乐高大小人形机器人|2022 ICRA【卡内基·梅隆大学】
发布人
当我们想到双足类人机器人时,我们倾向于想到的机器人不仅是人形状的,而且也是人尺寸的。 当然,也有例外——其中有一小类人形机器人,其中包括研究和爱好的人形机器人,它们并不真正打算做任何实际的事情。 但在上周举行的 IEEE 机器人与自动化国际会议 (ICRA) 上,卡内基梅隆大学 (CMU) 的机器人专家被问到一个有趣的问题:如果尝试缩小双足机器人的尺寸会发生什么? 论文中提出这个问题的一行总结了这一点:“我们这个项目的目标是制造微型步行机器人,小到乐高小人仔或更小。” IEEE报告:https://spectrum.ieee.org/a-first-small-step-towards-a-lego-sized-humanoid-robot 论文1:Scalable Minimally Actuated Leg Extension Bipedal Walker Based on 3D Passive Dynamics, by Sharfin Islam, Kamal Carter, Justin Yim, James Kyle, Sarah Bergbreiter, and Aaron M. Johnson from CMU, was presented at ICRA 2022, in Philadelphia Lab:CMU’s Robomechanics Lab https://www.cmu.edu/me/robomechanicslab/ 论文2:McGeer, T. (1990). Passive dynamic walking. Int. J. Robotics Res., 9(2), 62-82. AMBER Lab located at Caltech http://www.bipedalrobotics.com/
打开封面
下载高清视频
观看高清视频
视频下载器
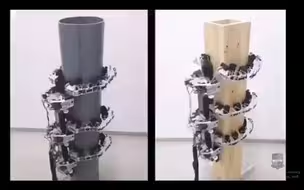
六足攀爬机器人|2019【日本法政大学】
人形机器人“朋友”护理现场演示|2022【川崎重工】
2024全球十大人形机器人:中国机器人强势崛起!
神经步态:学习双足运动|2022【加州理工Caltech】
基于解剖学的全尺寸人形机器人|2021【Automaton Robotics】
基于人体全身动态远程运动的双足机器人行走控制|2022【伊利诺伊大学厄巴纳-香槟分校】
人形克隆手抓取不同物体|2022【clonerobotics】
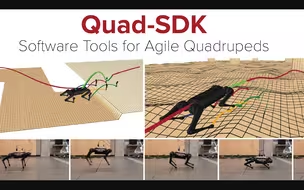
开源敏捷四足机器人运动软件框架Quad-SDK|2022 ICRA【卡内基梅隆大学】
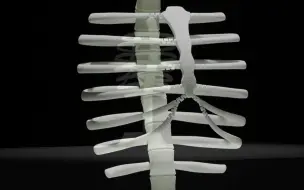
呼吸的骷髅|2020【東京大学】
每个人都需要一个口袋大小的机器人助手|2022【Agility Robotics】
为工作而生「人形机器人」digit|2021【 Agility Robotics】
马斯克确认Tesla Optimus Gen 2的生产价格为1万美元!
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
软连续体机械臂|ICRA 2022【ETH Zurich】
Ballie|2020【韩国三星】
人形机器人:修复人类难以触及的铁路架空电线|2022【西日本铁路JR West】
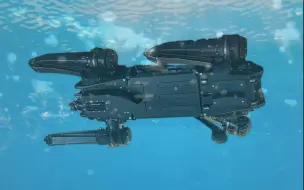
Vision 60会游泳的两栖机械狗:背步枪上山下水?|2022【美国Ghost Robotics】
大型扑翼机器人:serenity演示及创造史|2021【俄罗斯Rarok-2】
自动理发机器人|2020|Robot Hair Cut【Stuff Made Here】
软机器蛇实时仿真|2019【伍斯特理工学院】
受壁虎启发的机械手抓取|2021|斯坦福大学【Science Robotics】
3D软体机器人蛇|2022【伍斯特理工学院】
消除站立工作痛苦的辅助服|2020【日本アルケリス株式会社】
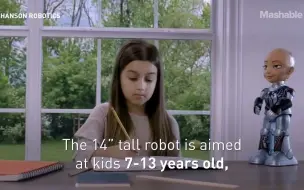
小索菲亚Sophia:35厘米人形机器人|2022【Hanson Robotics】
可穿戴肌肉Myoshirt:上肢日常生活辅助|2022【苏黎世联邦理工学院】
抓手机、透明试管、气球|指尖接近传感器机器人抓取|2021【日本大阪大学】
机器人通过力的物理交互同时重建物体及环境|2022【耶鲁大学】
Block-NeRF:280万张图片渲染整个旧金山街区|2022【谷歌Waymo】
超高速小型软体电磁机器人|2022【Nature Communications】
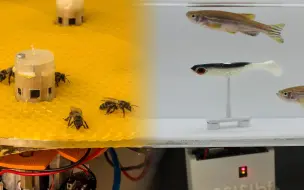
机器人使蜜蜂和鱼能够相互交谈|2019|EPFL洛桑联邦理工学院【Science Robotics】
Husky机器人监测南极企鹅种群|2022【Clearpath】
在256KB内存的STM32上训练神经网络|2022【MIT】
月球探测机器人“SORA-Q”|2022【日本TAKARATOMY联合日本宇宙航空研究开发机构】
葡萄种植、除草「农业机器人」|2021【法国Naïo Technologies】
谷歌AutoRT:具身智能大模型机器人大型编队|2023【Google Deepmind】
可打印的人造皮肤赋予机器人触觉|2022|Caltech加州理工【Science Robotics】
触觉设备2.0演示:打乒乓和组装宜家椅子|2022【韩国科学技术高等研究院】
人形机器人:自监督学习的傅里叶潜在动力学|2024【MIT】
开源项目SafePicking:通过对象级映射学习安全对象提取|2022 ICRA【帝国理工学院】
受蜜蜂启发的自主无人机3D打印|2022【帝国理工学院、伦敦大学学院】