V
主页
百度重磅推出RT-DETRv3,挑战所有RT-DERT与YOLO系列,实现目标检测的极速与精准
发布人
“SLYYDS24”,领【24年100篇最新智驾论文➕多领域面试真题➕公开课课件回放➕高质量交流群】, 本文提出了一种基于Transformer的实时物体检测算法RT-DETRv3。该算法在RT-DETR的基础上加入了多个密集正样本辅助监督模块。这些模块对RT-DETR中编码器和解码器的特定特征进行一对多物体监督,从而加速算法的收敛并提高其性能。实验表明该算法与其他实时物体检测器相比取得了更好的效果。 标题:RT-DETRv3: Real-time End-to-End Object Detection with Hierarchical Dense Positive Supervision 链接:https://arxiv.org/html/2409.08475v1
打开封面
下载高清视频
观看高清视频
视频下载器
YOLO11V2.1增量更新,新增目标追踪运动轨迹,优化推理线程,捕获进程窗口,解压覆盖原文件即可完成更新
研一在读,导师让学自动驾驶环境感知?有这45篇经典论文就够了!
重新定义自动驾驶的动态视觉?谷歌提出几何优先的动态场景方法MonST3R
完爆YOLOv11!Transformer+目标检测新算法性能无敌,狠狠拿捏CV顶会
浙江大学,百度 | 显著提升BEV三维物体检测性能的体素池方法:BEVSpread
自动驾驶主流感知范式:BEV
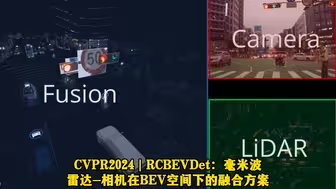
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
计算机视觉最不卷的方向:三维重建学习路线梳理
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
CVPR'24 | 视觉基础模型大一统?融合CLIP、DINOv2、SAM等,实现分类分割等任务上的SOTA性能
YOLOV5+Deepsort实现多目标追踪,原理详解+项目实战,看完就能跑通!(深度学习/计算机视觉)
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
Mamba+YOLO优势互补,检测精度碾压所有传统YOLO!
解决自动驾驶长尾问题,DOME模型结合扩散和OCC技术打造超真实世界模型
【CVPR 2024】全新轻量级CNN架构,RepViT模型解读!
半小时教你从YOLOV8丝滑过度到YOLO11,环境搭建到加载数据集、训练模型、推理、结合论文!轻松上手YOLO11-人工智能、目标检测
【字幕版】R-CNN及Fast RCNN目标检测算法
上海交大邹丹平团队的最新开源力作,Ground-Fusion:一种对极端情况具有鲁棒性的低成本地面 SLAM 系统。
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
加速人工智能发展的21个经典深度学习模型,在AI革命的历程中至关重要!
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
B站最全【Transformer教程精讲及其案例应用教程】一口气学完,transformer入门到实战教程!——(图像分类、图像分割、目标检测、机器学习)
基于深度学习的自动驾驶控制模拟(复现钱彬csdn播客)
不受物体数量和类别限制的全方位3D分割OmniSeg3D:通过分层对比学习实现全方位3D分割
YOLO最新模型出世!YOLOv11从环境搭建到模型训练与推理,迪哥半小时带你彻底掌握!
【yolov8】一小时掌握!从0开始搭建部署YOLOv8,环境安装+推理+自定义数据集搭建与训练,入门到精通!
【全289集】这才是科研人该学的,目标检测六大算法R-CNN、Fast R-CNN、YOLO、SSD等等一口气学完,全程通俗易懂!-人工智能/目标检测/YOLO
CVPR2024 | ADA-Track: 具有交替检测和关联功能的端 到端多摄像头3D多目标跟踪框架
一辆汽车,需要多少算力?自动驾驶芯片:规控算法与AI大模型
20分钟速通yolov11,从环境搭建到模型训练、推理、验证、导出一条龙实操!零基础小白也能基于YOLOV11训练自己的数据集!计算机视觉/目标检测
【人工神经网络】【准确率:93.03%】04 从零开始搭建一个人工神经网络(训练+测试)
2024年YOLO项目实战!《YOLOv8目标检测实战:Android(安卓)手机部署 》这可能是目前最好的项目实战教程!——(人工智能、深度学习、机器学习)
YOLO卷不动了,来试试DETR!目标检测:Transformer跨界CV做检测的开山之作—DETR目标检测算法原理详解+源码复现教程!(深度学习/计算机视觉)
Transformer能做逻辑推理吗?不曾展露的真实实力可能被你忽略了!看完这篇顿悟!
来自民间的30项关于特斯拉FSD v12版本 以上的实测,带你深度感受端到端 自动驾驶技术线路的优缺点
奶龙识别之藤田琴音
【强推】2024最完整版从入门到精通一口气学完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络!这不比刷剧爽多了!
【强推】草履虫都能学会!OpenCV+YOLO 实时目标检测,计算机视觉方向从零到实战,带你做毕设!(深度学习丨计算机视觉丨YOLO丨OpenCV)
端到端智能驾驶系统的优势与实现方式,以及端到端智能驾驶系统是自动驾驶的未来吗?
华为诺亚发布!MagicDrive3D适用于街景中的任意视图渲染的可控制的3D生成技术