V
主页
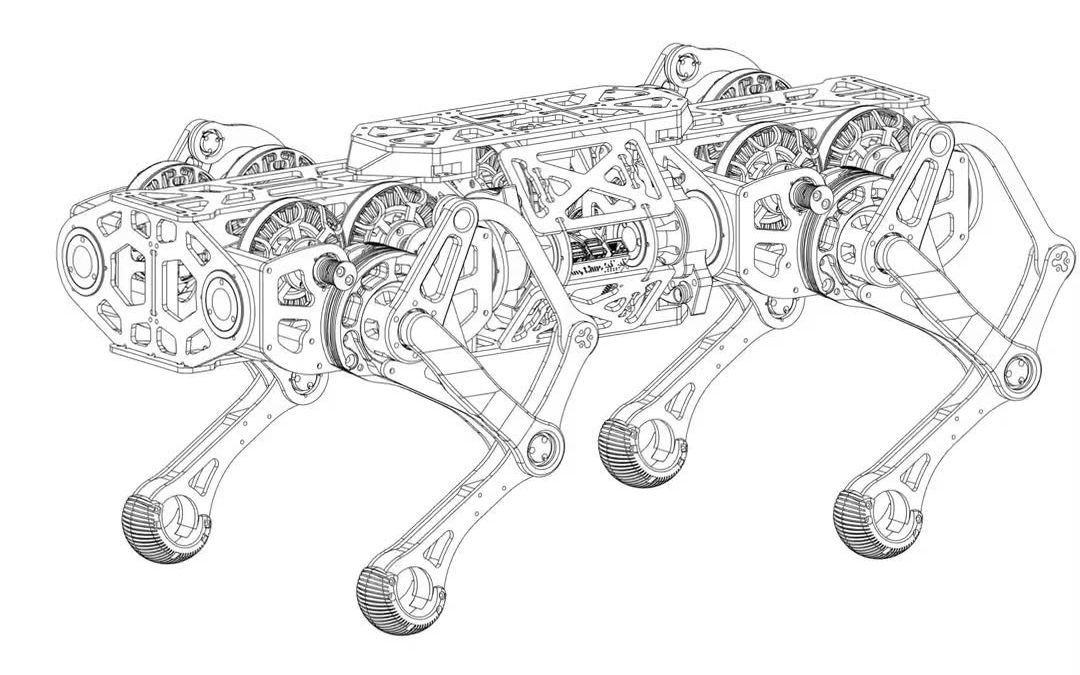
12自由度无刷机器狗设计欣赏
发布人
https://www.youtube.com/watch?v=z1GBo1RJGMc https://hackaday.io/project/176726-stanley-the-capstan-based-quadruped
打开封面
下载高清视频
观看高清视频
视频下载器
西交恐怖机器狗珍贵跳跃画面
机器狗与机械臂抓取调试中
外国小哥哥做的开源12自由度舵狗仿真欣赏
来,走两步……
【搬】机构欣赏
【搬】硬核的四足机器人3D打印制作过程
你见过四轴机器狗吗 | 还挺Q萌 #机器狗DIY
【搬】机械动作欣赏
机器狗520浪漫表白
PACC:使用 MPC 的四足机器人高负载协作搬运被动臂方法
【搬】小制作欣赏
【机甲出品】12自由度寻 迹四足 机 器 人
【搬】给舵狗安轮子欣赏
【搬】Vitruvio_ 用于行走机器人的开源腿部设计优化工具箱
捕捉minipupper(•͈˽•͈)
【搬】全向移动不倒翁小车欣赏
【搬】KINETIC 6 - 3D打印齿轮欣赏
溜了溜了……
[ IROS 24 ] DIABLO:完全由直接驱动关节组成的 6 自由度轮式双足机器人
TIMA机器人平台和ROZUM ROBOTICS
人形机器人远程视觉操纵
四足运动:用三种不同的方法在崎岖地形上行走
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
盘一种球齿轮(•͈˽•͈)
【搬】轮足欣赏
完备的2自由度脚踝假肢Ver.1首次测试
钢铁侠喵
人形机器人远程视觉操纵 论文和代码在简介
迷你3d传感器
【搬】螺丝欣赏
滑稽 狗遛狗
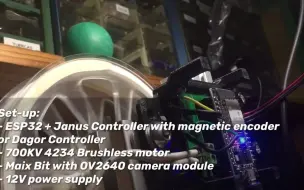
使用SimpleFOC和计算机视觉控制球轮系统
Talk 04_ W. Xingxing, Unitree Robotics _ ICRA2021 WS on Legged Robots
【搬】机构欣赏
【搬】机构欣赏
【搬】波士顿机器人欣赏
高效可锁定弹簧踝(ELSA)假体
Real-time Mapping of Industrial Structures with the Spot Quadruped Robot
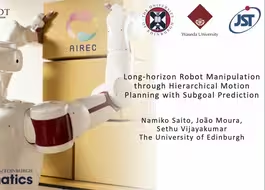
[ ICRA 24 ]通过具有子目标预测的分层运动规划实现长远操控
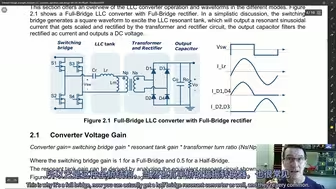
EEVblog #1294 - LLC谐振转换器设计