V
主页
京东 11.11 红包
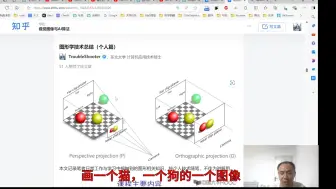
SLAM与三维重建的区别
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
CT重建原理:平行投影重建与拉东变换2
【2024已完结】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,原理解读+实战分析,迪哥一次性全讲明白!—人工智能/神经网络/深度学习
7最小二乘的BPF重建
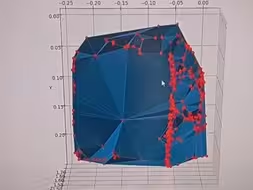
双目摄像头三维重建
12迭代重建MLEM的直观例子
9BPF重建的傅里叶分析
【SLAM】【空间计算】RoboBaton系列产品正式亮相【三维重建】【AI赋能】
CT重建原理:扇形光束重建
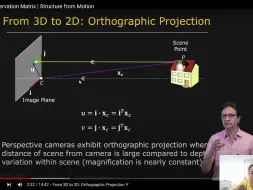
【哥伦比亚大学CV课程】002运动恢复结构SFM——2观测矩阵
【3D点云+三维重建】最好出论文的研究方向,博导带你从零解读两大方向的核心算法PointNet与NeuralRecon!赶紧收藏
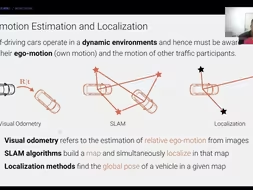
【德国图宾根大学-自动驾驶课程】里程计与SLAM——1介绍:里程计与SLAM和定位之间的关系
【哥伦比亚大学CV课程】010主动照明方法——1编码结构光
Go2开发教学10-SLAM 导航服务接口
计算机视觉与图形学的区别
【德国图宾根大学-自动驾驶课程】重建与运动——1对极几何与图像矫正
【德国图宾根大学-自动驾驶课程】重建与运动——4场景流
【哥伦比亚大学CV课程】008图像处理2——1傅里叶变换
【哥伦比亚大学CV课程】001光流——1光流与运动场
【德国图宾根大学-自动驾驶课程】里程计与SLAM——2VO:间接法与小孔成像原理
【哥伦比亚大学CV课程】002运动恢复结构SFM——1运动恢复结构的问题
SLAM算法为什么需要内存管理机制
【德国图宾根大学-自动驾驶课程】重建与运动——3光流
Yolov8源码解析(三):整体解读
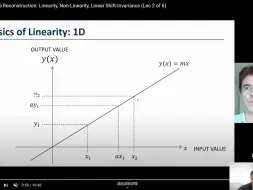
2线性,非线性,平移不变性
【德国图宾根大学-自动驾驶课程】重建与运动——2立体视觉匹配与深度图
【哥伦比亚大学CV课程】011校正的立体视觉——1相机模型与内外参矩阵
回溯——分割回文串
16最大泊松似然与MLEM算法
【哥伦比亚大学CV课程】011校正的立体视觉——2相机校正_获取投影矩阵
贪心——跳跃游戏2,最少跳跃数
里程计与SLAM——4BA与回环检测
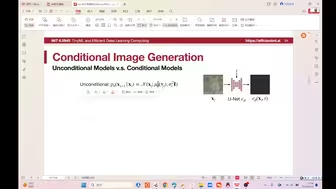
【MIT的模型压缩与优化课程】16.1DiffusionModel——带有条件的扩散模型
Yolov8结构解析
【三维重建】变分贝叶斯的Gaussian Splatting(文献解读)
零样本3D重建!无需真实数据也能生成逼真3D模型
20图像重建中的机器学习与深度学习1
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
混淆矩阵怎么看?
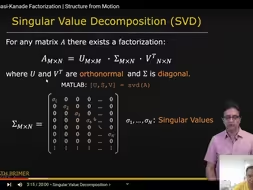
【哥伦比亚大学CV课程】002运动恢复结构SFM——4TK分解求M和S
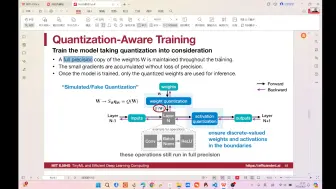
【MIT的模型压缩与优化课程】4.4量化——QAT的原理