V
主页
京东 11.11 红包
【IROS 2023】基于多目标黑盒优化的日常辅助模块化机器人设计
发布人
https://www.youtube.com/watch?v=ztcq0P92mJI
打开封面
下载高清视频
观看高清视频
视频下载器
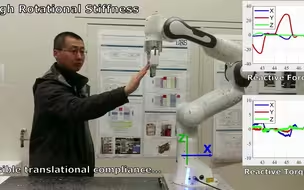
7自由度机器人Franka Panda 变阻抗控制
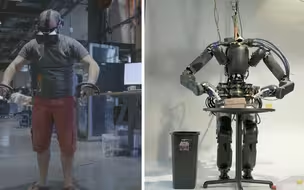
Apptronik人形机器人快速行为测试
KUKA IIWA 人机协同装配1
阻抗控制的学习与规划
上肢康复机器人Harmony SHR
摆线针轮减速器的工作原理--设计、打印与测试
【TRO】 变曲率连续体机器人形状传感的李群公式及灵敏度分析
人形机器人设计方案
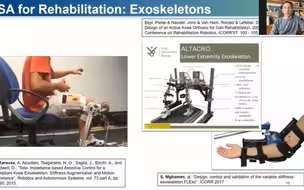
用于上肢辅助的外骨骼-JEXO
应用于康复中心的上肢康复机器人Armeo
3自由度球形关节的工作原理(生肉)
kuka iiwa在装配过程中避免碰撞
基于Arduino的六足蚂蚁机器人
【IJRR】KUKA IIWA双臂协调运动规划 01
IHMC公司的人形双足机器人
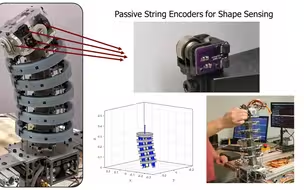
LIMS3机器人工作空间中的柔顺度测试
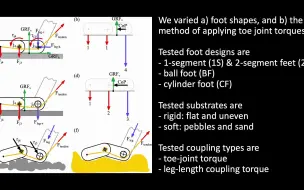
适应多种自然地形的多段足式机器人
大型液压六足机器人
一种磁齿轮及其工作原理
【TRO】 多功仿生刚柔混合折纸执行器
六自由度并联机器人
机器人遥操作:使用热风枪
下肢康复外骨骼-LokomatPro 自由模式
RoK-Arm9 机器人人重力摩擦力补偿实验
EksoUE日常助力上肢外骨骼
使用达芬奇机器人完成外科手术
这么会玩机械臂 你不要命啦!
不怕你入行,就怕你怕来怕去#电气自动化#自动化培训#工业机器人#PLC
机器人技术的未来展望 MIT CSAIL
RLS雷尼绍磁编码器的偏心修正
自动化物流仓储——机器人、AGV、货架、物流调度系统、WMS
Kuka机器人
想转行自动化把握时机抓紧入行#电气自动化#PLC#工业机器人#自动化培训
这个同伸缩机构是我司一个初中生设计的
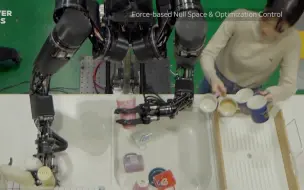
AMBIDEX机器人的抓取实验 - 感知和力控制
KUKA机器人雕刻法老头像
简单又实用还省成本的90度翻转机构老板都说你牛得冒烟了
具有闭环MPC的稳健行走双足人型机器人
Epson机器人原点位校正教程