V
主页
京东 11.11 红包
机器人技术的未来展望 MIT CSAIL
发布人
https://www.youtube.com/watch?v=HmNxzg2_cso
打开封面
下载高清视频
观看高清视频
视频下载器
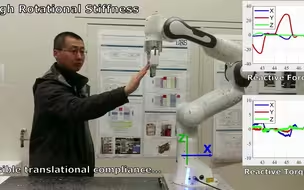
7自由度机器人Franka Panda 变阻抗控制
上肢康复机器人Harmony SHR
用于提高人类能力柔顺驱动
基于Arduino的六足蚂蚁机器人
阻抗控制的学习与规划
一种磁齿轮及其工作原理
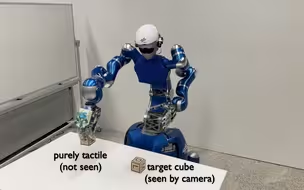
基于强化学习的手部触觉灵巧操作
【IJRR】KUKA IIWA双臂协调运动规划 01
一种高速度高刚度并连线驱动机器人
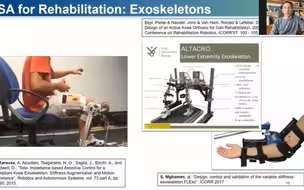
LIMPACT: 一种液压驱动的自对准上肢外骨骼
DLR 贾斯丁机器人的纪录片
下肢康复外骨骼-LokomatPro 自由模式
【TRO】一种可扩展的多机器人远程阻抗控制框架
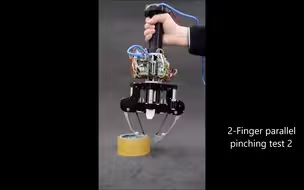
3指5自由度自适应夹爪BLT Gripper
基于学习的机器人足球赛
【IROS2021】具有低惯性独立的 2 自由度踝足假肢,可在不平坦的地形上灵活行走
整机3D打印的四轴飞行器 Part1
ETH 基于接触状态估计的强化学习任务装配
20种有趣的仿生机器人
可变刚度假肢及其感知机制
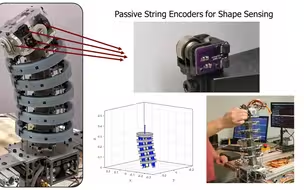
【TRO】 变曲率连续体机器人形状传感的李群公式及灵敏度分析
6自由度电液驱动机器人与人机交互
LIMS3机器人工作空间中的柔顺度测试
波士顿动力Stretch用于工厂仓储搬运
ANYexo: A Versatile and Dynamic Upper-Limb Rehabilitation Robot
Apptronik人形机器人快速行为测试
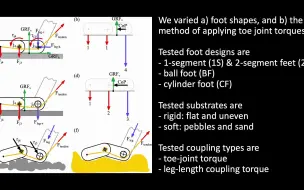
适应多种自然地形的多段足式机器人
用于上肢康复的双臂外骨骼EXO-UL8 加州大学洛杉矶分校
3自由度球形关节的工作原理(生肉)
kuka iiwa在装配过程中避免碰撞
RoK-Arm9 机器人人重力摩擦力补偿实验
KUKA机器人雕刻法老头像
多模式三级倒立摆实验平台(混沌摆)
机器人遥操作:使用热风枪
【IROS 2023】基于多目标黑盒优化的日常辅助模块化机器人设计
Ossur为残疾人打造的动力假肢
KUKA IIWA 人机协同装配1
双臂机器人的精细遥操作:使用镊子
用于上肢辅助的外骨骼-JEXO
利用电流环反馈学习人类行走的双足机器人(筑波大学)