V
主页
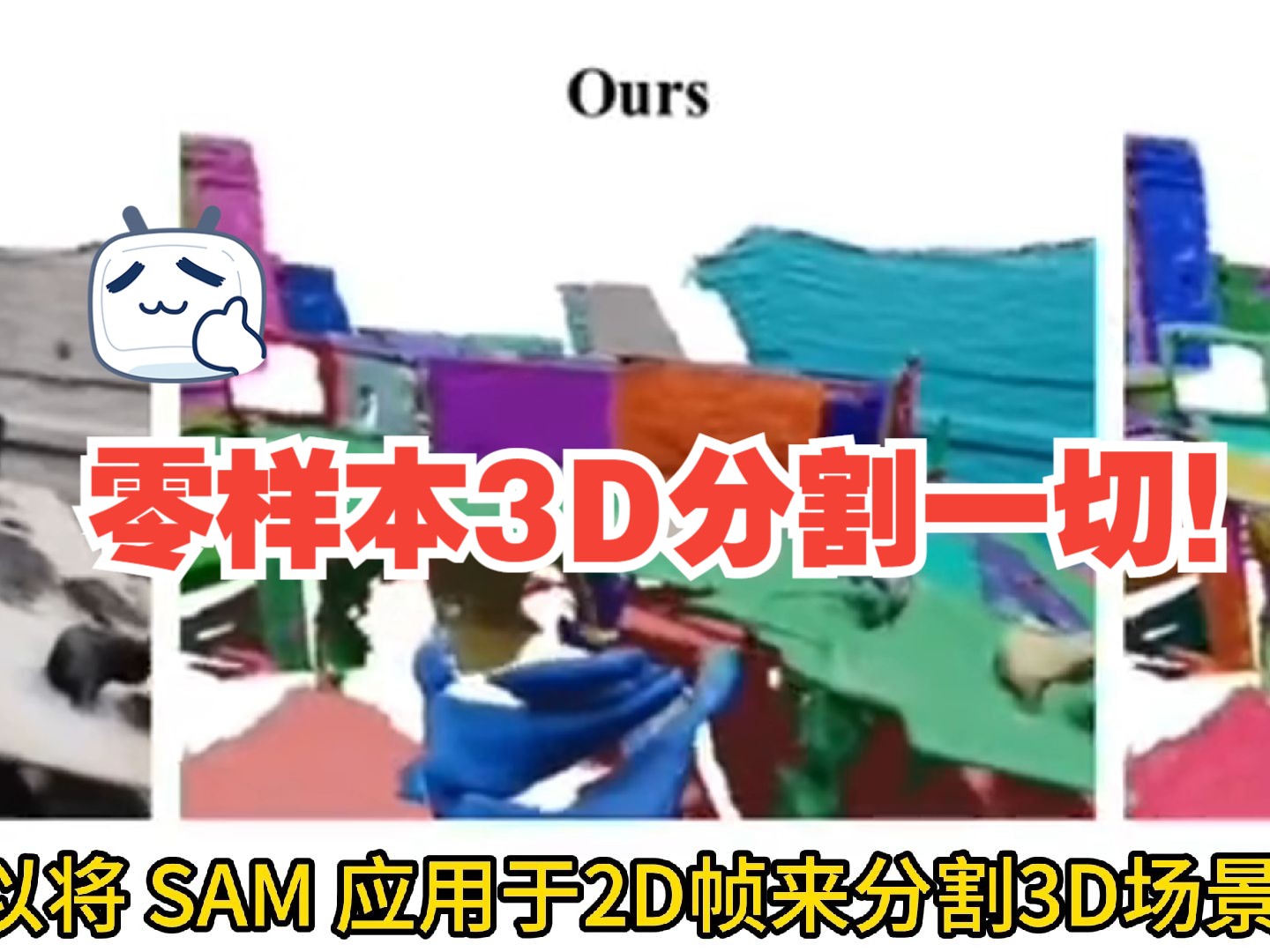
无需额外训练!SAMPro3D:零样本3D分割一切!
发布人
无需额外训练!SAMPro3D:零样本3D分割一切! #人工智能 #计算机视觉 #算法 #科技 在微信公众号「3DCV」回复:「原论文」,获取论文代码和链接,赶快学起来! 今天笔者为大家推荐一篇室内3D场景分割一切的工作,在给定3D场景的3D点云和多个2D帧的情况下,可以将 SAM 应用于2D帧来分割3D场景。我们引入SAMPro3D进行零样本三维室内场景分割。在给定3D场景的3D点云和多个2D帧的情况下,我们的方法通过将预训练的分割任何事物模型( SAM )应用于2D帧来分割3D场景。我们的核心思想是将场景中的3D点定位为自然的3D提示,以使它们的投影像素提示在帧之间对齐,确保像素提示和它们的SAM预测掩码的帧一致性。此外,我们建议根据所有2D帧的反馈来过滤掉低质量的3D提示,以提高分割质量。想看更多关于3D视觉、SLAM,自动驾驶等科技前沿,请立即关注@3D视觉工坊
打开封面
下载高清视频
观看高清视频
视频下载器
HeadCraft-超逼真头部细微特征生成!3DMM的革命!
亲测50帧!无需内参!超越Dust3r!Spann3r:无需优化对齐快速进行3D重建!
ICLR‘24 Spotlight 首个十亿级别3D通用大模型
Mobile-Seed:联合语义分割和边缘检测!
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
上交最新开源!仅需4张图像实现高质量3D重建!
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
CVPR2024开源NetTrack:跟踪高动态物体!
【最强抠视频神器一键部署】视觉大模型SAM2.0,可以分割视频内的一切!!自媒体工作者的神器!超详细使用全流程讲解
CVPR'24商汤开源!3DGS再进化,可控的3D编辑!
无需 GPS:语义地图引领多机器人室内外探索
给任何模型上色!腾讯打通三维重建最后一关:高质量纹理生成!
2.4倍加速!PRAM最新开源的视觉定位模型!解锁以地图为中心的学习!
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
极快跟踪一切!DOT:无惧遮挡!
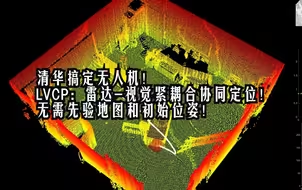
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
CVPR'24开源 MASA万能匹配一切、跟踪一切!
中科院最新CityGaussian:VRAR时代的城市重建新标杆
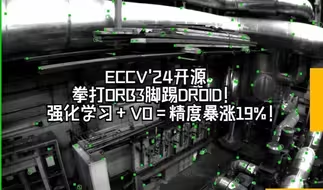
ECCV'24开源 | 拳打ORB3脚踢DROID!强化学习+VO=精度暴涨19%!
Mamba+YOLO优势互补,检测精度碾压所有传统YOLO!
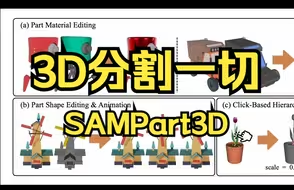
3D分割一切新工作!SAMPart3D:分割3D对象中的一切部件!
【导师散养不教】研究生1个月如何拿下SCI三区一作?基本套路+实操演示,手把手带你轻松搞定SCI论文!(SCI论文/SCI论文写作/人工智能)
ECCV'24开源 !无惧遮挡、动态、光照变化!最鲁棒的3DGS震撼来袭!
Nature子刊!MARS实验室最新开源:基于LiDAR点流的运动事件检测!
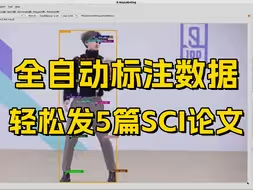
自从有了这个项目,自动标注私有数据集,一年狂水5篇SCI!
预测误差降低36%!小波变换+Transformer荣登Nature!
小波变换+CNN荣登CV顶会!监测准确性高达93.73%!
交叉注意力机制+特征融合,模型准确率100%!
Depth Anything!最强开源单目深度估计SOTA!
具身智能势不可挡GRUtopia首个城市级具身智能仿真平台“浦源·桃源”
四元数基础
性能炸裂!SpectroMotion:唯一一个镜面场景的动态3D重建。
“低成本高性能”,Mamba多模态轻松拿捏A会!
RT-DETRv3横空出世!Transformer+目标检测性能完爆YOLOv10!
迈向真实世界的一大步:4D-GS建模实时动态场景!
香港大学&南科大!通过基于模型的学习实现直接基于点的端到端机器人导航
NeRF巅峰之作!超快端到端MeshLRM 实现不到1s的高质量重建!
3.9k star!2张图片重建稠密3D场景!竟然还不需要相机内参!