V
主页
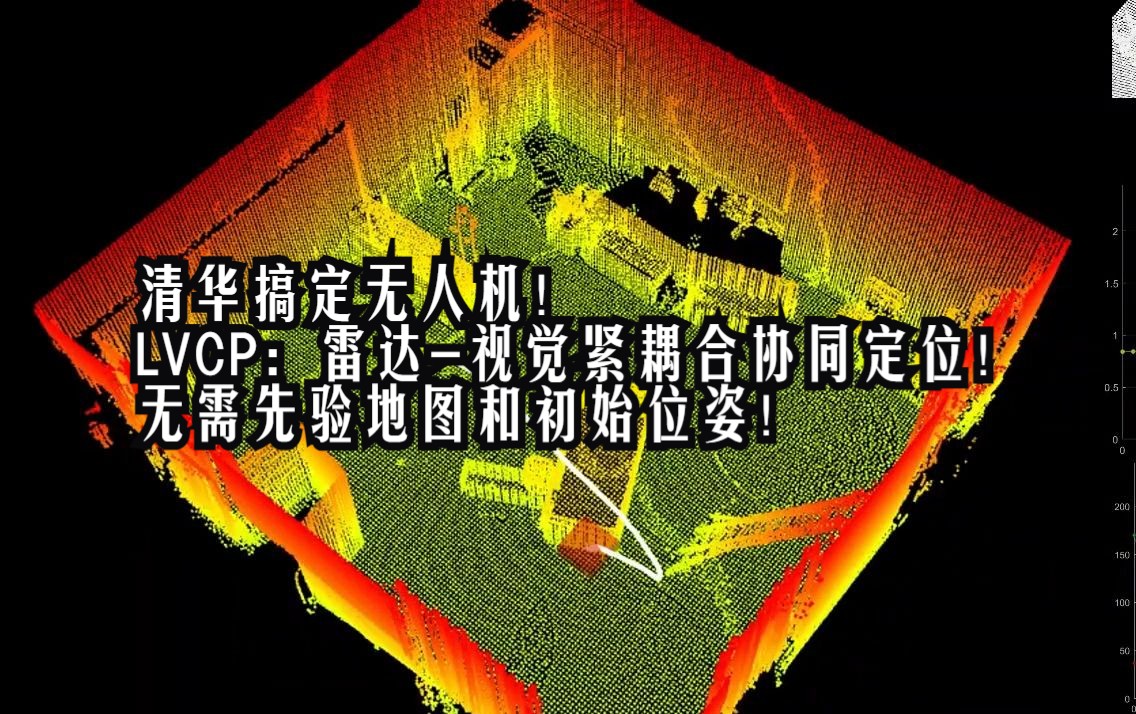
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
发布人
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿! 在微信公众号「3D视觉工坊」后台回复:「原论文」,获取论文代码和链接,赶快学起来! 我们提出了一种从粗到细的框架,以实现激光雷达与视觉的实时协同定位。在该框架中,通过构建视觉特征与激光雷达点之间的点到平面关联,PSO-Sampling算法提供了粗略的相对定位。然后,通过构建点辅助的束调整(Point-aided BA)优化结构来实现精确定位。此外,在初始化过程中,采用基于多级采样的点云辅助相机初始化框架来获得准确的初始姿态。我们进行了实验来验证所提算法的有效性。数据集和我们自己的现实世界实验均表明,该算法即使在初始姿态估计不准确的情况下也表现出鲁棒性,并能在复杂环境中解决单目VIO的漂移问题。此外,我们还将该算法扩展到多无人机场景,并证明了其可行性。
打开封面
下载高清视频
观看高清视频
视频下载器
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
最新!无人机动态环境感知&规划新思路!
用ai喂出来的抽象人类
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
顶刊论文:LineTR:用于视觉定位的上下文感知线描述符
无所不能!OASim基于3D GS的自动驾驶开源和自适应模拟器!
李飞飞团队重磅开源ReKep:万能具身机器人!实时交互,还可搭载GPT-4o!
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
CVPR'24开源 MASA万能匹配一切、跟踪一切!
NeRF巅峰之作!超快端到端MeshLRM 实现不到1s的高质量重建!
华科大最新PointDreamer3D纹理重建,清晰如真
自从有了这个项目,自动标注私有数据集,一年狂水5篇SCI!
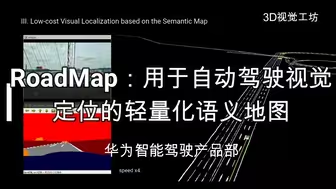
华为最新工作:RoadMap:用于自动驾驶视觉定位的轻量化语义地图
爆!!清华薛公子拳打北航辅导员独家解析
[IROS2021] 使用镜面反射减少机器人视觉系统中的遮挡
怪不得都说Github是学Python人的天堂!!!
【ChatGPT4.0手机版】国内无需魔法,无限次数使用教程来了!
清华最新开源万能3D分割一切!
CVPR2024 3D-GS再进化实时自适应视图渲染的未来!
香港理工大学最新工作:基于激光雷达的实时定位及网格划分
用AI做古人怼人视频,小白也能涨粉20W
各省普通话标准程度
中山大学最新提出 基于LiDAR-测距-惯性融合的机器人群体协同SLAM系统
当清北的落榜生陈闲来到清华,给高考“状元”们….
当3DGS遇上可泛化物体位姿估计
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
清华&华为&中科院!首个基于3D高斯分布的大场景高保真重建和实时渲染方法
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
UIUC&英伟达开源NeRFDeformer转换3D场景仅需一张RGB-D快照!(CVPR'24)
【全748集】清华大佬终于把C语言做成动画片了,2024最新版,学完即就业!这是真的草履虫都能学会的教程了!!!
小波变换+Transformer荣登Nature!预测误差降低36%!
你可以控制图像中的一切!Image Sculpting:精确编辑图像中的任何目标!
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
有了这个算法,你的无人机再也不怕撞鸟了,IROS2021,事件相机+目标检测+轨迹预测!
全息投影桌垫,人手一个“贾维斯”不是梦
王炸!AI视频天花板,随心掌控视频生成,一键启动!
高考状元,715分,清华在读
看完这道题会颠覆你的世界观
清华i人保护协会:社恐可以不去教室上课
四旋翼无人机-PX4控制算法代码