V
主页
ICLR‘24 Spotlight 首个十亿级别3D通用大模型
发布人
智源视觉团队近期的工作:3D视觉大模型Uni3D在ICLR 2024的评审中获得了688分,被选为Spotlight Presentation。在本文中,作者第一次将3D基础模型成功scale up到了十亿(1B)级别参数量,并使用一个模型在诸多3D下游应用中取得SOTA结果。代码和各个scale的模型(从6M-1B)均已开源。 在公众号「3D视觉工坊」后台,回复「原论文」,即可获取论文及代码地址。
打开封面
下载高清视频
观看高清视频
视频下载器
基于单张图片的3D人脸重建概述
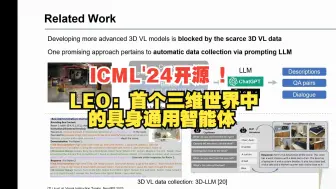
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
Occupancy Networks后处理
Open3D与点云处理简介(公开课)
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
当3DGS遇上可泛化物体位姿估计
CVPR'24开源|NeRF-SLAM新SOTA:请任意选择你的高效神经
ECCV'24开源 | 拳打ORB3脚踢DROID!强化学习+VO=精度暴涨19%!
Occupancy占用网络的多维应用探究
无需额外训练!SAMPro3D:零样本3D分割一切!
四旋翼无人机-PX4控制算法代码
【国内白嫖】8月24日最新ChatGPT4.0
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
四旋翼无人机-遥控器简介
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
CVPR'24开源 ADA-Track端到端3D多目标跟踪最新SOTA!
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
CVPR2024开源NetTrack:跟踪高动态物体!
四旋翼无人机-SO3姿态控制原理
2.4倍加速!PRAM最新开源的视觉定位模型!解锁以地图为中心的学习!
零基础入门四旋翼建模与控制无人机 | 位置PID控制实战
高速结构光三维面形测量方法
8月23日最新ChatGPT4.0使用教程,国内版免费网站,电脑手机版如何免下载安装通用2024
具身智能势不可挡GRUtopia首个城市级具身智能仿真平台“浦源·桃源”
光学3D测量技术原理及应用
【¥385/拼装】奇怪工作室 - 1/60 丰碑
ECCV'24开源 !无惧遮挡、动态、光照变化!最鲁棒的3DGS震撼来袭!
四元数基础
CVPR2024 3D-GS再进化实时自适应视图渲染的未来!
零基础入门四旋翼建模与控制无人机 | 基础知识
CVPR满分论文!即插即用的6D物体姿态估计大模型(BOP排行榜第一)
三维点云系列视频——第一章绪论
3DGS进化,高效高质量的GaussianPro来袭!
CVPR23开源 超越LoFTR!大尺度变化下的特征匹配!
CVPR'24开源 MASA万能匹配一切、跟踪一切!
香港大学&南科大!通过基于模型的学习实现直接基于点的端到端机器人导航
Python之函数的定义