V
主页
移动机器人技术-实验课1-CoppeliaSim机器人仿真与ROS控制
发布人
中国农业大学《移动机器人技术》课程教学视频 实验课1-CoppeliaSim机器人仿真与ROS控制
打开封面
下载高清视频
观看高清视频
视频下载器
移动机器人技术-实验课2-ROS amcl定位和move_base导航
移动机器人技术-实验课3-ROS gmapping 2D激光雷达制图
ROS控制 | 小车底盘控制讲解
基于Gazebo的无人车激光SLAM建图与导航仿真
Isaac Sim和ROS2自主移动机器人(bcr_bot)
【开源无人机】ROS系统中yolo模型处理多摄像头
VegeBot机器人: 喷药、施肥、机械除草
12步搭建智能机器人: 从设计到AI入门
机器人移动底盘
闲置一年的自制ros小车,终于第一次成功利用开源gmapping建图
移动机器人技术-作业和项目预期效果-点云投影制图 & 运动里程计 & 循迹导航控制
使用Isaac Sim和ROS2控制机器狗指南
自动驾驶入门技术全栈实战解析-1-感知篇
自驾车ROS实践 - Self Driving and ROS – Learn by Doing! Odometry & Control
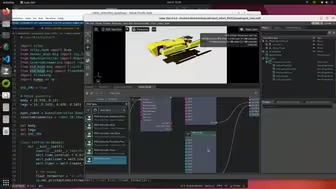
使用Isaac Sim和ROS2实现大田农业机器人
NVIDIA Isaac ROS 3.0:重塑机器人未来
机器人移动底盘遥控测试
【开源无人机】从零调试一架开源无人机M0-F250
【开源无人车】从零组装一辆开源PIX无人车
【开源无人车】从零调试一辆PIX无人车
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
MoveIt与Isaac Sim结合使用
【开源无人机】ROS无人机编队代码讲解
六轴机械臂标准模型控ROS函数库快速上手
A-LOAM和LeGo-LOAM的SLAM对比,使用Kitti数据集odometry的05序列
电饭锅们出来军训了ʕ ᵔᴥᵔ ʔ
基于手持PS3 eye传感器的三维空间声源定位
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
自动驾驶入门技术全栈实战解析-2-定位篇
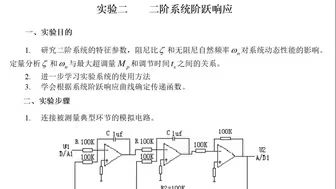
【控制实验指导】 实验二 二阶系统阶跃响应
UniAg机器人:蔬菜对靶喷药
Digital Farmhand Demonstration
实验课偷拍的
ros系统rcfusion多模态复现
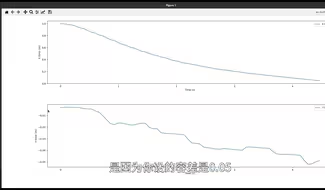
7.2无人机PID参数调试
【开源教程】ROS驱动程序控制舵机(源码资源链接在简介)
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
【开源无人机】move_base自主导航参数详解
【开源无人机】从零组装一架开源无人机M0-F250
学长说:有佬的帮助就是不一样!!!