V
主页
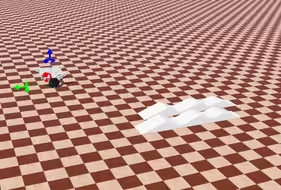
【Webots】五连杆轮腿平衡机器人仿真(二)
发布人
时隔好久 再发一弹
打开封面
下载高清视频
观看高清视频
视频下载器
【Webots】五连杆轮腿平衡机器人仿真(四)
【Webots】五连杆平衡机器人仿真尝试
上交平衡步兵模型。理论,仿真,源码详细讲解。助您快速上手。(一)
【RoboMaster】2018赛季工程机器人调试
【Robot】不用小心翼翼
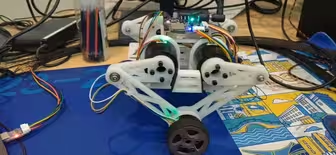
【轮腿机器人】平衡第一步
【RoboMaster】机器人弹丸交接失误高清画质
【Webots仿真寄录】三角舵轮-路径规划与控制
毕设记录第一集——gazebo五车三机仿真环境
【Robot】遥控器连接成功
平衡步兵理论,仿真,源码详细讲解。助您快速上手。(二,matlab仿真讲解)
【轮腿机器人】奇奇怪怪
【RoboMaster】无情的取弹机器
平衡步兵理论,仿真,源码详细讲解。助您快速上手。(三,keil5代码讲解)
【Robot】蹒跚学步
【RoboMaster】2018赛季工程机器人调试
酷!哈工大高会军教授、李湛副教授团队研发出新型矢量飞行机器人
solidworks转CAD映射文件 2份GB版本&通用版本
卧龙凤雏得其一便可安天下,而机器狗和无人机我们现在都世界领先
RM2017 全国赛第52场 上海交通大学 VS 中国石油大学(华东)
ROS 坐标导航的 C++ 编程实现
机器人附加分离语句插件
一款开源的 ROS 航点导航插件
【自制】我开发了一个通用机器人大脑!【硬核】
【RoboMaster2017】全国赛 16进8 中国矿业大学-东北大学 第1局(观众席视角)
国产四足机器狗逐际动力W1全新升级为轮足机器人。#机器狗 #机器人 #轮足机器人 #逐际动力 #机器人送快递
【手把手教做轮足机器人】1_概论和机械结构
RM2017 西部赛区 第33场 第五名争夺赛 兰州理工大学-太原理工大学 第一局
宁波企业自主研发人形机器人“贾维斯”,拥有44个关节,其中70%零部件由宁波本土企业生产!
HumanPlus学会穿鞋后站起来走路
【RoboMaster2017】全国赛 16进8 中国矿业大学-东北大学 第2局(观众席视角)
和卡内基梅隆大学的Prof. Zhang, Ji合作的开源项目Daiblo Saukele!
南京理工大学人工智能硕士,在大厂工作的薪资情况。
【Robot】小心翼翼
毕业作品:陆空两栖无人机
RM2017 北部赛区 第19场 黑河学院—辽宁科技大学
Kibo-Chan
RM2017 南部赛区 第17场 华南农业大学-电子科技大学中山学院
ROS2之远程桌面NoMachine
迷你型机械臂,使用zigbee无线控制,加入了卡尔曼滤波。