V
主页
自然多接触步行|2022|RA-L【Caltech】
发布人
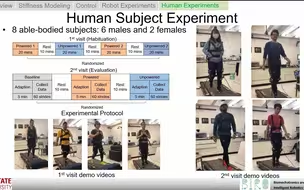
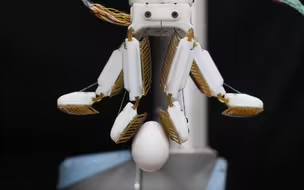
生成稳定的步行步态,在机器人辅助设备上执行时产生自然运动是一项具有挑战性的任务,通常需要领域专家手动调整。提出了一种替代方法,将肌肉骨骼模型直接添加到步态生成过程中,直观地塑造最终的行为。特别是,构建了一个多域混合系统模型,将系统动力学与肌肉模型相结合,以表示自然的多接触步行。然后可以通过混合零动力学 (HZD) 方法为该模型生成可证明的稳定步行步态。实验应用集成框架在双驱动经股骨假体 AMPRO3 上为两个受试者实现多接触运动。结果表明,执行肌肉模型约束会产生产生自然运动的步态(通过与运动捕捉数据和肌电
打开封面
下载高清视频
观看高清视频
视频下载器
鳍驱动的水下机器人|2018【Festo】
软机器人学习爬行|2022【丰田工业大学芝加哥分校】
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
管道攀爬机器人:RSTAR|2022【Ben-Gurion University of the Negev】
birdbot:一种高效节能的机器人腿|2022|Science Robotics【德国马克斯·普朗克研究所】
神经步态:学习双足运动|2022【加州理工Caltech】
BIOIC线驱软连续机器人|2022【德国弗劳恩霍夫研究所】
机器人学导论|2008|Oussama Khatib【Stanford】
软连续体机械臂|ICRA 2022【ETH Zurich】
环形软舞机器人|2022【北卡罗来纳州立大学】
为工作而生「人形机器人」digit|2021【 Agility Robotics】
半机器甲虫:像机器人一样被控制的真正昆虫|2016【南洋理工大学】
准备爬行「3D打印爬行机器人」|2016【東京大学】
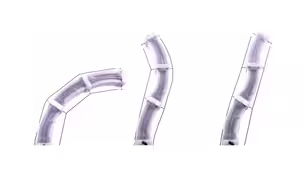
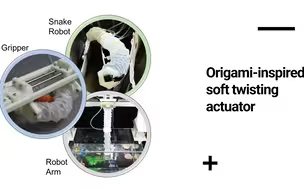
折纸结构启发的软扭转致动器|2022|SoRo【南方科技大学】
Rotebrate回椎動物(2022)|山中俊治【東京大学】
复合凸轮从动机构【SIGGRAPH Asia 2021】
轻量膝关节外骨骼|2022【TRO】
栖息的类鸟机器人|2021|斯坦福大学【Science Robotics】
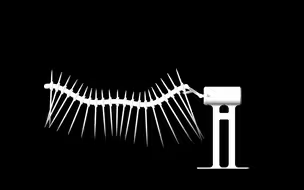
软机器蛇实时仿真|2019【伍斯特理工学院】
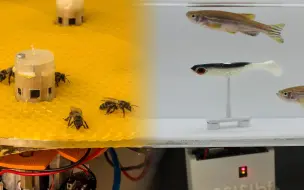
机器人使蜜蜂和鱼能够相互交谈|2019|EPFL洛桑联邦理工学院【Science Robotics】
多臂有效载荷操作-混合现实|2022【苏黎世联邦理工学院】
SpaceBok:低重力下像猫一样跳跃的机器人|2022|ETH Zürich【T-RO】
Strandbeest进化|2021【Theo Jansen】
消除站立工作痛苦的辅助服|2020【日本アルケリス株式会社】
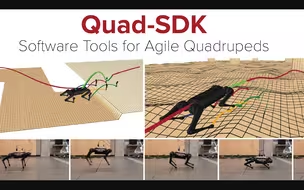
开源敏捷四足机器人运动软件框架Quad-SDK|2022 ICRA【卡内基梅隆大学】
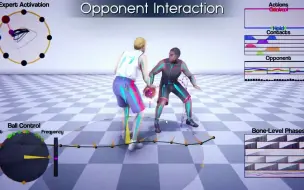
AI4Animation:基于深度学习的动画角色控制|2022【ACM Trans. Graph】
可打印的人造皮肤赋予机器人触觉|2022|Caltech加州理工【Science Robotics】
类昆虫机器人|2021【MIT & 香港城市大学】
月球探测机器人“SORA-Q”|2022【日本TAKARATOMY联合日本宇宙航空研究开发机构】
超高速小型软体电磁机器人|2022【Nature Communications】
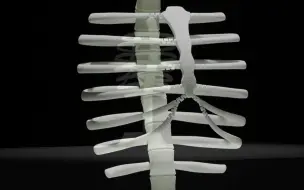
呼吸的骷髅|2020【東京大学】
使用机器人实现水产养殖自动化|2021【MIT】
学习猴子在树上荡来荡去|2022【英属哥伦比亚大学】
受壁虎启发的机械手抓取|2021|斯坦福大学【Science Robotics】
学习双足走与跑切换|2022【日本东北大学】
Agile But Safe:学习无碰撞高速腿式运动|2024【CMU】
Flippy:一种软体自主攀爬机器人|2017【哈佛大学工程与应用科学学院】
泡泡造软体机器人|2021【Nature】
在256KB内存的STM32上训练神经网络|2022【MIT】
全向移动履带式机器人|2011年【大阪大学】