V
主页
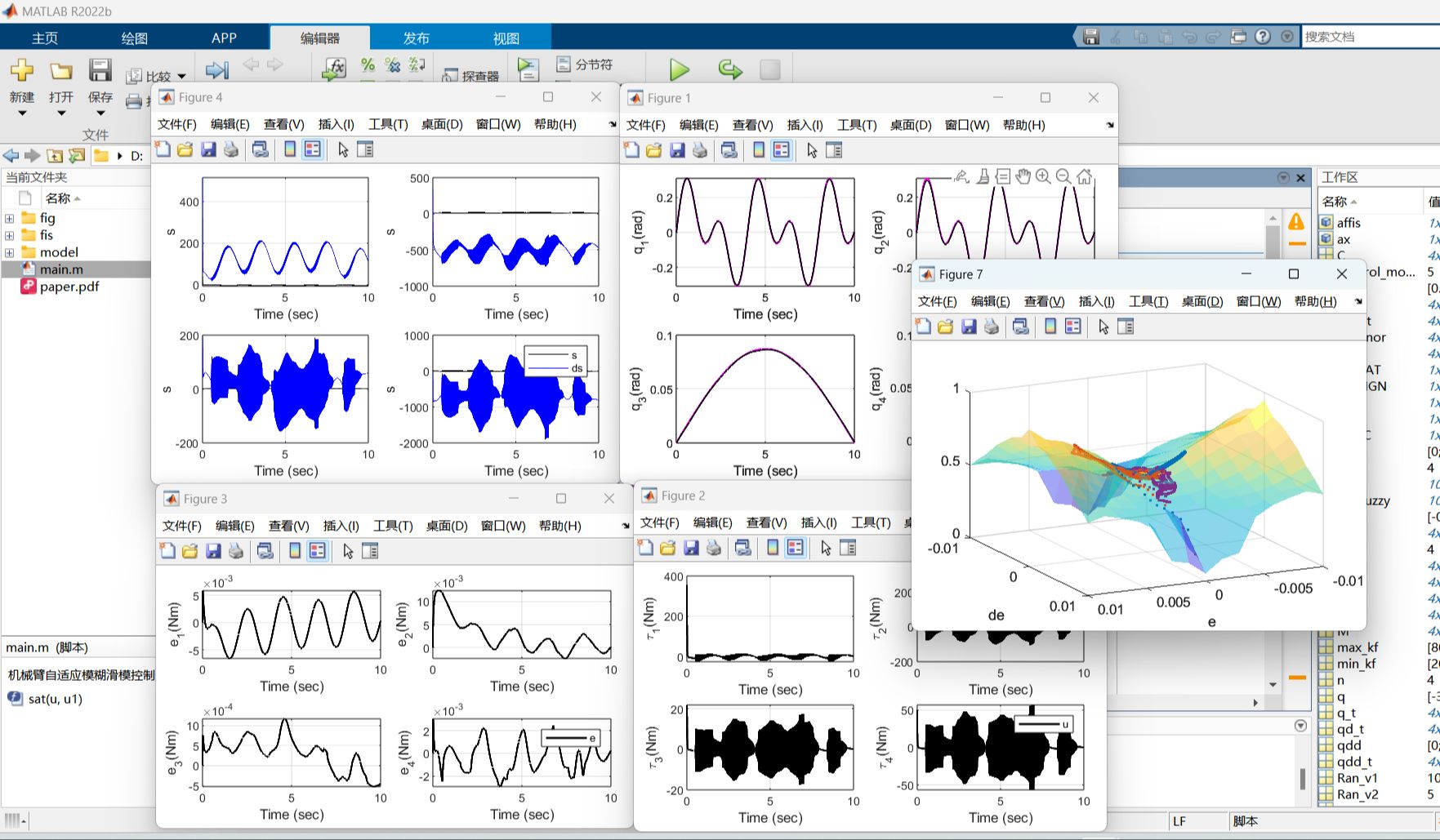
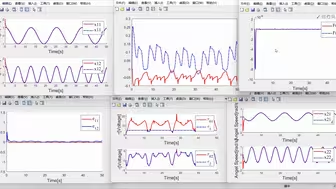
机械臂改进自适应模糊滑模控制与三种经典控制对比仿真
发布人
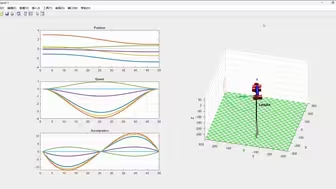
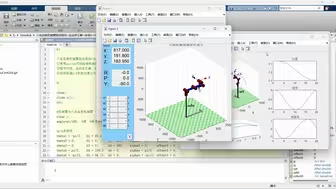
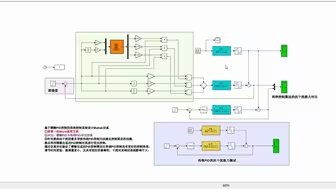
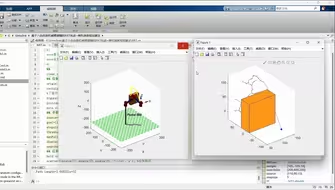
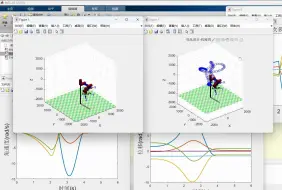
机械臂改进自适应模糊滑模控制与三种经典控制对比仿真 四种控制对比: ①简单PID控制器, ②滑模控制(SMC), ③模糊滑动模式控制(FSMC), ④自适应模糊滑模控制(AFSMC) 附带参考文献详细推导过程 仿真结果:与传统的带PID滑模控制系统的仿真结果进行了比较,结果表明,AFSMC控制具有良好的跟踪性能,对不确定性和干扰具有较强的鲁棒性。
打开封面
下载高清视频
观看高清视频
视频下载器
【一区顶刊复现】自适应强化学习机械臂固定时间轨迹跟踪控制(输入饱和不确定)
机械臂自适应反演滑模控制(非线性干扰观测器)Matlab仿真
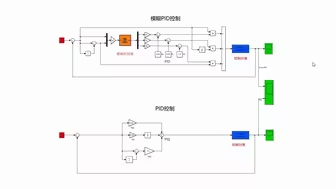
基于Matlab的模糊PID控制加热炉温度系统仿真
模糊PID与PID控制simulink仿真比较
六自由度机械臂+RRT路径轨迹规划算法仿真
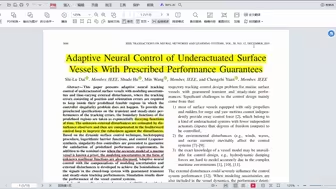
基于神经网络的船舶轨迹跟踪自适应滑模控制【附参考文献】
改进蚁群算法的机器人,无人机,无人车,无人船的路径规划算法
基于模型预测MPC的二自由度机械臂控制仿真模型【复现】
多逆变器自适应虚拟阻抗下垂控制策略simulink仿真
[复现]基于MPC模型预测控制水下机器人AUV路径规划及轨迹跟踪仿真
机械臂笛卡尔空间与关节空间圆弧+直线轨迹规划MATLAB程序
基于RBF神经网络的PID自适应参数调节控制
六自由度机械臂路径规划+运动学正解+标准D-H参数法
机械臂关节空间轨迹规划【笛卡尔空间+混合多项式+五次多项式】
今天把我做的这个机械臂开源
基于自适应模糊PID控制实现双容水箱液位系统【附说明文档】
基于非奇异终端滑模控制的二自由度机械臂系统
基于模糊PID控制的供热控制系统设计Matlab仿真
六自由度机械臂+RRT算法路径规划避障Matlab程序
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
机械臂识别采摘果实
改进二阶超螺旋滑模观测的永磁同步电机无位置传感器控制仿真
【复现】二自由度机械臂自适应分数阶滑模控制(FOSMC)+分数阶PID
【真机演示】CrossDex:跨具身抓取,用一个策略控制任意的灵巧手
基于MPC+NMPC模型预测控制的车辆运动学模型轨迹跟踪Matlab仿真【附说明文档】
基于六自由度机械臂避障的RRT轨迹+梯形速度规划算法
复刻原版稚晖君Dummy机械臂之控制篇
永磁同步电机模型参考自适应MRAS控制Simulink仿真
INSGA算法+六自由度机械臂七次B样条曲线轨迹规划
BP神经网络自适应PID控制 matlab仿真【附说明文档】
基于模糊PID控制的永磁同步电机矢量控制系统simulink仿真
《关于大一新生做的抓取物体机械臂这档事》
保姆级手把手IsaacLab安装教程
六自由度机械臂多项式关节空间轨迹规划算法【3次多项式、5次多项式插值法、353多项式】
基于STM32单片机蓝牙智能机械臂挖掘机控制小车
基于MPC+NMPC模型预测控制四旋翼无人机轨迹跟踪仿真【附说明文档】
【SCI一区复现】基于优化反步控制的水面舰船自适应跟踪控制
力反馈手套在遥操作方案中的应用
复现_基于一致性算法的改进自适应虚拟阻抗多机并联控制Simulink仿真
科研案例|基于 PyBullet 的具身智能软硬件平台 BestMan