V
主页
京东 11.11 红包
六自由度机械臂+RRT算法路径规划避障Matlab程序
发布人
六自由度机械臂+RRT算法路径规划避障Matlab程序 ①将RRT算法应用于机械臂轨迹规划避障,并且采用三次B样条函数对路径进行拟合优化 ②程序中的起始点坐标、障碍物可修改,无关节碰撞检测。 程序带有中文注释,便于学习
打开封面
下载高清视频
观看高清视频
视频下载器
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
基于RRT的机械臂路径规划【B样条6关节空间优化】
机械臂关节空间轨迹规划【笛卡尔空间+混合多项式+五次多项式】
改进蚁群算法的机器人,无人机,无人车,无人船的路径规划算法
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
IEEE'24 | 最小成本!安全协作!异构无人机飞行的路径规划新策略!
基于人工势场法的机械臂避障路径规划方法Matlab仿真
[复现]基于MPC模型预测控制水下机器人AUV路径规划及轨迹跟踪仿真
机械臂改进自适应模糊滑模控制与三种经典控制对比仿真
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
机械臂笛卡尔空间与关节空间圆弧+直线轨迹规划MATLAB程序
基于MATLAB/simulink的B样条曲线路径规划自动平行泊车
3基于采样的最优路径规划算法
机械臂笛卡尔空间位姿插补
基于Matlab的船舶航向自动控制系统仿真设计【附说明文档】
基于非线性干扰观测器的机械臂自适应反演滑模控制【参考文献】
基于matlab的二级倒立摆的数学建模
Matlab的神经网络PID设计
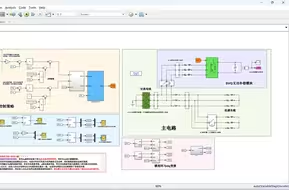
改进两级式光伏并网+低电压穿越+改进MPPT算法Matlab仿真模型
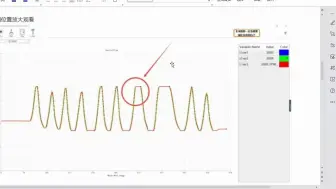
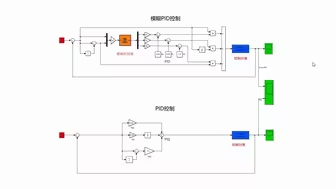
基于模糊PID控制的供热控制系统设计Matlab仿真
强化学习-自动驾驶路径规划控制决策-sac的高速公路和遮挡场景训练
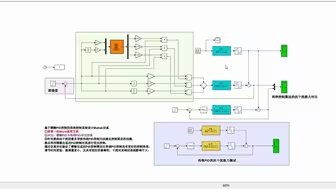
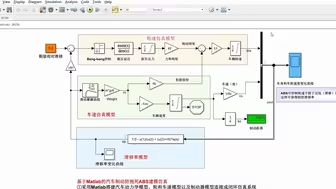
基于Matlab的汽车制动防抱死ABS建模仿真
把玩 HybridAstar -- 双向搜索初步
【复现】连续线性系统自适应最优输出与动态规划控制调节Matlab程序
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
基于Matlab的模糊PID控制加热炉温度系统仿真
基于STM32的ADC采集滤波算法_卡尔曼_中位值_同步对比输出源程序
具身智能机械臂实操入门课程-01:软件环境配置和双臂标定
BP神经网络自适应PID控制 matlab仿真【附说明文档】
论文复现:MPC-D-CBF (基于动态屏障函数的移动机器人balabala的模型预测控制)
基于STM32实现PID控制程序
三电平光伏并网逆变器低电压穿越Matlab仿真模型
模糊PID与PID控制simulink仿真比较
2D Fast-Planner+MPC跟踪+Perception Aware
SVG静止无功发生器无功补偿控制并网Matlab仿真
光伏交直流混合微电网双下垂控制离网(孤岛)模式Matlab仿真模型
PFC-LLC谐振开关电源设计方案整套学习资料(程序+仿真+硬件软件说明报告+原理图+计算书等等)
【顶刊复现】基于MPC模型预测控制水下机器人AUV的路径跟踪
基于状态空间模型预测控制的四旋翼路径跟踪实现(源码+报告)
三相异步电机DTC直接转矩控制matlab仿真系统