V
主页
3DGS进化?2DGS颠覆3D场景重建!
发布人
3DGS进化?2DGS颠覆3D场景重建! 在微信公众号「3DCV」回复:「原论文」,获取论文代码和链接,赶快学起来! 本文介绍了一种名为2D Gaussian Splatting (2DGS) 的新方法,用于从多视角图像中建模和重建几何精确的辐射场。传统的3D高斯点云投影 (3DGS) 在准确表示表面方面存在问题,因为它无法处理多视角不一致性。2DGS 的关键思想是将3D体积折叠成一组2D定向平面高斯圆盘,这种方法能够提供视角一致的几何形状,同时准确地恢复薄表面并实现稳定的优化。为了实现这一目标,文章介绍了透视准确的2D投影过程,利用了射线-圆盘相交和光栅化技术。另外,文章还提出了深度扭曲和法向量一致性项,以进一步提高重建质量。作者通过证明他们的可微分渲染器可以实现无噪声和详细的几何重建,并且保持了竞争力的外观质量、快速的训练速度和实时渲染。他们计划将代码公开发布。@3D视觉工坊
打开封面
下载高清视频
观看高清视频
视频下载器
3DGS进化,高效高质量的GaussianPro来袭!
CVPR2024 3D-GS再进化实时自适应视图渲染的未来!
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
戴森机器人实验室发布SuperPrimitive:三维重建&视觉里程计&深度补全轻松搞定!
3.9k star!2张图片重建稠密3D场景!竟然还不需要相机内参!
上交最新开源!仅需4张图像实现高质量3D重建!
中科院最新CityGaussian:VRAR时代的城市重建新标杆
关于3DGS的最新综述,3D重建与新型视图合成
最新开源MVSGaussian:基于多视角 立体图像的快速通用高斯溅射重建 训练提速13倍,渲染300+FPS
NeRF巅峰之作!超快端到端MeshLRM 实现不到1s的高质量重建!
与CityDreamer相比速度提高60倍!GaussianCity:重建你的无人机视图与自动驾驶场景【可在主页预约四场与”3DGS ”相关的公开直播课
超越所有SOTA!3DGS结合NeRF到4DGF 重塑动态城市场景新视图合成
迈向真实世界的一大步:4D-GS建模实时动态场景!
CVPR'24商汤开源!3DGS再进化,可控的3D编辑!
CVPR 2022 基于曼哈顿世界假设的神经网络三维场景重建
Mobile-Seed:联合语义分割和边缘检测!
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
最新!无人机动态环境感知&规划新思路!
重磅开源SA-GS:重新定位最新大场景3D重建SOT
CVPR2024开源NetTrack:跟踪高动态物体!
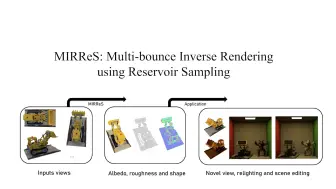
[逆渲染] 南洋理工、浙大、商汤等提出MIRReS,一种NeRF逆渲染算法,加入多次反弹光追,在复杂场景下达到更好的几何、材质和光照的重建效果
CVPR'24开源 通过3D GS进行整体城市3D场景理解!
无需额外训练!SAMPro3D:零样本3D分割一切!
港科大&南科大 跨平台和环境的统一多传感器SLAM数据集
图宾根大学最新提出 | 基于3D高斯的高效紧凑的三维场景表面重建技术
北大&清华开源!S3Gaussian首个无需标注的自动驾驶动态Gaussian!
HeadCraft-超逼真头部细微特征生成!3DMM的革命!
MIT最新开源!Clio如何确定机器人语义地图的细粒度!
ICCV 2023 Oral | ScanNet++重磅出世!3D室内场景的高保真数据集!
R3LIVE:一个健壮、实时的Lidar-IMU-视觉紧耦合顶尖SLAM框架
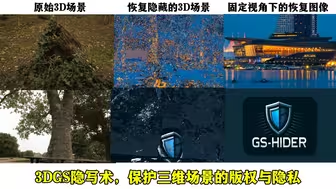
3DGS隐写术—GS-Hider,用以保护三维场景的版权与隐私【可在主页预约与3DGS相关的两场直播公开课】
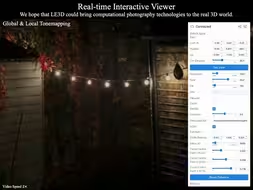
旷视LE3D点亮每一片黑暗HDR合成训练时间少99%2K渲染FPS提高最多4000倍!
Depth Anything!最强开源单目深度估计SOTA!
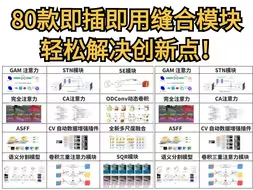
研究生自救指南!80个最新即插即用缝合模块,快速搭建模型结构,提速200%解决paper创新方案——注意力机制、SE模块、语义分割、多尺度融合!
上海 AI Lab&同济大学!基于八叉树结构的3D高斯体渲染方法,实现一致的实时渲染性能
华科大最新PointDreamer3D纹理重建,清晰如真
研究生必学!目前B站最好的【三维重建】教程,15小时深入浅出SfM与SLAM核心算法!计算机视觉3D三维重建/摄像机几何/多视图几何
相机标定的基本原理与经验分享
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
[3DGS] 南开大学实时新视图合成、HDR 渲染、重新聚焦和色调映射更改,相比体渲染,训练速度缩短至1%,2K分辨率渲染提升4000倍