V
主页
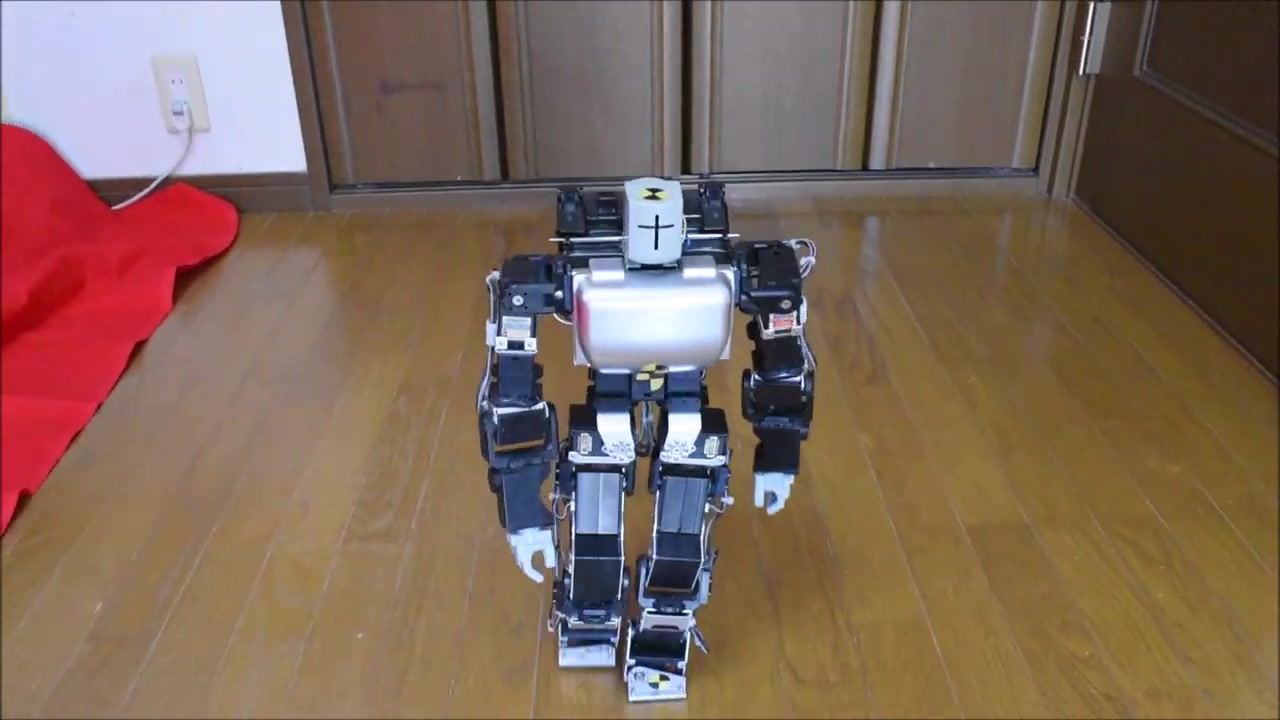
像人一样行走的机器人Ⅱ
发布人
https://www.youtube.com/watch?v=aVJs_x2a9z4 使用腰部,脚趾和脚跟的新步行方法。与前一次相比,由于脚趾和脚跟的影响,脚步声也较小。
打开封面
下载高清视频
观看高清视频
视频下载器
【搬】倒立摆机器人克服台阶的动力学分析
钢铁侠喵
小赛罗有机器人玩具!
【搬】Vitruvio_ 用于行走机器人的开源腿部设计优化工具箱
【搬】用于无传感器动态交互任务的可反向驱动的六自由度并联机器人
行走机构验证
萌萌哒・喵喵
萌萌哒・机器人欣赏
【搬】用于机器人的高度可反向驱动的减速齿轮箱 - Yasutaka Fujimoto
外星机器人入侵城市,机器猫化身变形金刚拯救了地球🥺
【搬】M.A.T.H SS -DIY小舵机变形机器人行走测试 1
Kickstarter众筹热门项目 | KT2 Kungfu Turtle,袖珍功夫机器人
使用SimpleFOC和计算机视觉控制球轮系统
22自由度舵狗完整视频介绍
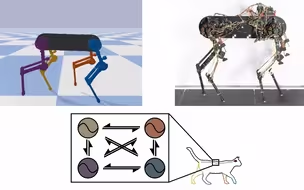
【搬】四足机器人相关研究的预告摘要视频集
【搬】在闭环中心模式生成器中学习机器人动力学的塑性匹配
CG动画都不敢这么做,宇树人形机器人量产!
不愧是乐高
我听说这是每个STEM男人的梦
浙江人形机器人创新中心发布首个具有精确技能作业能力的人形机器人“领航者2号NAVIAI”
你喜欢我吗?
刚换的机械手很好用/3D打印影视道具/塑料玩具非金属
Gerardo Bledt(麻省理工学院):推广和改进腿式机器人的正则化预测控制
人类在游乐场与砖块傀儡作战
天链人形机器人1 Pro,71个自由度,即将亮相2024北京世界机器人博览会
Custom Quadruped- Demo #3 - Force-Sensitive Foot - Linear Hall Effect Mechanism
超魔改PWM舵机之力控触觉演示(EX6)
【搬】DIY4缸引擎
【搬】ETH Zürich 机器人实验室2022年亮点
超萌全向移动小机器人
Custom Quadruped- Demo #5 - Force Sensitive Foot - Force Test
Towards Autonomous Inspection of Concrete Deterioration in Sewers with Legged Ro
LEGO 无线可控独轮车
【搬】ANYmal在DARPA SubT比赛中的表现
【搬】拐弯的履带小车
【搬】基于图的多传感器融合的自主建筑机器人定位(讲座)
【搬运】微型飞行器的模型预测控制: 综述
任赜宇博士公开课 中
一根毛都不缠绕?!!这是什么扫拖机器人黑科技!
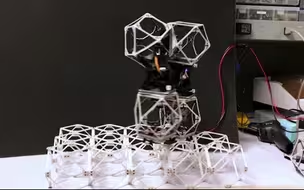
【搬】MIT的迷你组装机器人欣赏