V
主页
清华最新开源万能3D分割一切!
发布人
清华最新开源 万能3D分割一切! 在「3D视觉工坊」微信公众号回复:「原论文」,获取论文代码和链接,快学起来! 为了全面理解3D场景,需要一种通用的3D分割方法,该方法可以分割不同的物体,不受物体数量或类别的限制,同时也要反映其固有的层次结构。为了实现这一点,我们提出了OmniSeg3D,这是一种全向分割方法,旨在一次性分割3D中的任何内容。关键见解是通过分层对比学习框架将多视图不一致的 2D 分割提升为一致的 3D 特征字段,该框架通过两个步骤完成。首先,我们设计了一种基于与类别无关的二维分割的新型分层表示,以模拟像素之间的多层次关系。其次,将2D特征场渲染的图像特征聚类在不同层次上,根据不同层次之间的层次关系,可以进一步拉近或推开;在应对不一致的 3D 分割带来的挑战时,该框架生成了全局一致的 2D 特征字段,从而进一步实现了分层分割、多对象选择和全局离散化。大量的实验证明了我们的方法在高质量的3D分割和准确的分层结构理解方面的有效性。图形用户界面进一步促进了全域 3D 分割的灵活交互。@3D视觉工坊
打开封面
下载高清视频
观看高清视频
视频下载器
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
从零搭建一套结构光3D重建系统 [理论+源码+实践]
无需额外训练!SAMPro3D:零样本3D分割一切!
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
Go!最新NeRF和SLAM结合开源方案!超越NICE-SLAM和DROID-SLAM!
【已完结】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,原理解读+实战分析,迪哥一次性全讲明白!—人工智能/神经网络/深度学习
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
无视干扰,谷歌开源SpotlessSplats:3D场景重建中的干扰物识别与排除
清华最新开源MARS!第一个基于NeRF的自动驾驶开源模拟器!
ICCV 2023 Oral | ScanNet++重磅出世!3D室内场景的高保真数据集!
重磅开源SA-GS:重新定位最新大场景3D重建SOT
Depth Anything!最强开源单目深度估计SOTA!
【ChatGPT4.0国内手机版免费】免魔法 无限次数,可下载APP到桌面使用。
北大&清华开源!S3Gaussian首个无需标注的自动驾驶动态Gaussian!
多视图几何MVS简介及MVSNet如何高效入门?
华科大最新PointDreamer3D纹理重建,清晰如真
清华&小米汽车最新开源!OccNeRF:基于神经辐射场的自监督多相机占用预测!
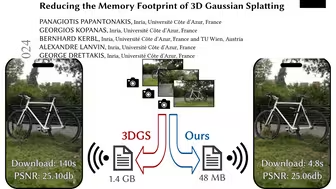
3DGS官方团队新作!减少3DGS内存占用,可达29.87倍压缩,渲染速度提高1.7倍!
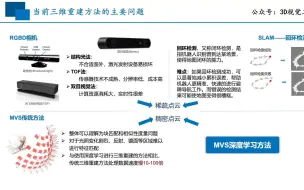
多视图几何方式的三维重建
上交最新开源!仅需4张图像实现高质量3D重建!
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
Nature正刊开源!突破低延迟自动驾驶视觉感知!
研究生必学!目前B站最好的【三维重建】教程,15小时深入浅出SfM与SLAM核心算法!计算机视觉3D三维重建/摄像机几何/多视图几何
什么?不做时间同步也可以实现LiDAR-相机三维重建?
CVPR2024开源NetTrack:跟踪高动态物体!
清华大学 《沟通的逻辑》全8集
中科院开源AI学术论文神器爆火!GPT学术版~
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
CVPR'24开源 通过3D GS进行整体城市3D场景理解!
CVPR23开源 超越LoFTR!大尺度变化下的特征匹配!
【PyMed v0.2更新】人工智能医学影像分割模型本地部署,一键分割全身104个器官和上尿路器官!
Nature子刊!MARS实验室最新开源:基于LiDAR点流的运动事件检测!
国防科大最新 | DistGrid:基于分布式神经辐射场阵列的大规模场景重建
CVPR最佳论文候选:NeRF下一城! 用启发式引导分割去除瞬态干扰物,无需额外先验知识【中山大学】
[ICRA2022]谷歌机器人子公司Intrinsic最新开源机器人抓取论文
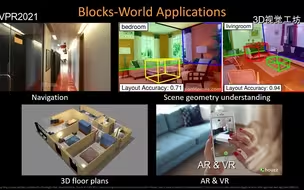
CVPR2021,结构光低计算成本准确恢复分段平面场景
最新ICCV2021论文,基于分层内存匹配网络的视频对象分割
2024最新ELA注意力机制,超越当前一众最新注意力机制,适用于深度学习图像分类、语义分割、目标检测等