V
主页
无所不能!OASim基于3D GS的自动驾驶开源和自适应模拟器!
发布人
无所不能!OASim:基于3D GS的自动驾驶开源和自适应模拟器! #人工智能 #计算机视觉 #算法 #科技 #编程 在微信公众号「3DCV」回复:「原论文」,获取论文代码和链接,赶快学起来! 端到端自动驾驶算法发展迅速,但是收集真实世界数据昂贵、耗时且不安全,因此自动驾驶模拟器的重要性不言而喻。今天笔者为大家推荐OASim,一项最新的基于神经隐式重建和渲染的开放自适应自动驾驶模拟器,环境由隐式表面重建技术表示。静态环境和移动对象由网络分别建模,移动对象可以形成前景资产库,可插入场景中。代理外观、驾驶轨迹和传感器配置可以自定义,以生成高保真度的数据,用于感知和控制等下游应用。作者还提供了一个用户友好的交互式可视化界面,用于导入和导出数据、编辑设置并可视化渲染结果。想看更多关于3D视觉、SLAM,自动驾驶等科技前沿,请立即关注@3D视觉工坊
打开封面
下载高清视频
观看高清视频
视频下载器
便宜好用!这款国产大模型样样精通?
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
CVPR2024 3D-GS再进化实时自适应视图渲染的未来!
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
迈向真实世界的一大步:4D-GS建模实时动态场景!
无需额外训练!SAMPro3D:零样本3D分割一切!
极快跟踪一切!DOT:无惧遮挡!
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
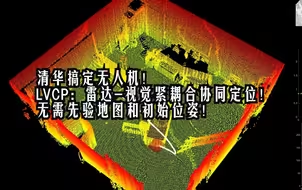
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
NVIDIA再斩CVPR冠军方案!Hydra-MDP:突破端到端多模态自动驾驶!
AI视频界杀出一匹大黑马!
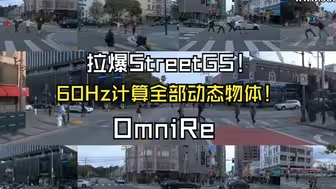
拉爆StreetGS!60Hz计算全部动态物体!OmniRe:城市3D场景重建的最新框架!
端到端!首个开源视觉Transformer四旋翼控制避障方案!
平民拍车神器!威固MOVMAX口袋车拍减震臂体验分享丨大疆Pocket3相机
中科院新作!即插即用的meshing模块!精确构建无动态mesh地图,还能纠正里程计!
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
ICRA2022:自适应环境的移动机器人自主导航
CVPR'24开源 MASA万能匹配一切、跟踪一切!
OA-SLAM:在视觉SLAM中结合物体语义进行相机重定位[ISMAR 2022]
Depth Anything!最强开源单目深度估计SOTA!
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
手摸手的AI编程cursor实战【小白教程】
南洋理工大学开源F-LOAM:最为精确和快速的开源激光SLAM方案之一
GPT-o1国内白嫖教程,手把手教学包用上
CVPR'24 3D-GS再进化Scaffold-GS实时自适应视图渲染的未来
世界上第一个专为无人机集群设计的激光雷达惯性里程计框架
互补滤波姿态估计、卡尔曼滤波姿态、高度估计
CVPR'24最佳学生论文亚军!新赛道!SpiderMatch:3D形状匹配
领导: 代码跑还是你跑?
金字塔扩散模型:高效生成精细3D大场景!
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
神经辐射场照亮动态SLAM:构建精细场景地图
码不能乱扫,一个无法溯源但可以储存文件的二维码技术
地图再也没有边界!腾讯发布无限3D场景生成!
图宾根大学最新提出 | 基于3D高斯的高效紧凑的三维场景表面重建技术
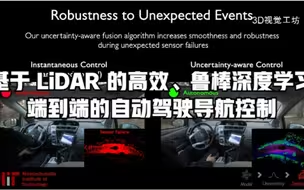
ICRA2021,基于 LiDAR 的高效、鲁棒深度学习端到端的自动驾驶导航控制,大幅减少接管次数(代码开源)
有了这个算法,你的无人机再也不怕撞鸟了,IROS2021,事件相机+目标检测+轨迹预测!
载入历史,今天云栖大会通义100多个模型宣布全部开源!
当e人空姐遇到i人大学生旅客