V
主页
京东 11.11 红包
RI Seminar- Ross L. Hatton - Snakes & Spiders, Robots & Geometry
发布人
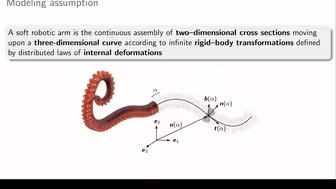
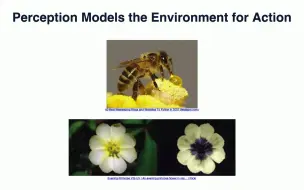
cmurobotics Ross L. Hatton Associate Professor Robotics & Mechanical Engineering , Oregon State University May 2, 2022 Snakes & Spiders, Robots & Geometry Abstract: Locomotion and perception are a common thread between robotics and biology. Understanding these phenomena at a mechanical level involves nonlinear dynamics and the coordination of many degrees of freedom. In this talk, I will discuss geometric approaches to organizing this information in two problem domains: Undulatory locomotion of snakes and swimmers, and vibration propagation in spider webs. In the first section, I will discuss how differential geometry and Lie group theory provide insight into the locomotion of undulating systems through a vocabulary of lengths, areas, and curvatures. In particular, a tool called the *Lie bracket* combines these geometric concepts to describe the effects of cyclic changes in the locomotor’s shape, such as the gaits used by swimming or crawling systems. Building on these results, I will demonstrate that the geometric techniques are useful beyond the “clean” ideal systems on which they have traditionally been developed, and can provide insight into the motion of systems with considerably more complex dynamics, such as locomotors in granular media. In the second section, I will turn my attention to vibration propagation through spiders’ webs. Due to poor eyesight, many spiders rely on web vibrations for situational awareness. Web-borne vibrations are used to determine the location of prey, predators, and potential mates. The influence of web geometry and composition on web vibrations is important for understanding spider’s behavior and ecology. Past studies on web vibrations have experimentally measured the frequency response of web geometries by removing threads from existing webs. We have constructed physical artificial webs and computer models to better understand the effect of web structure on vibration transmission.
打开封面
下载高清视频
观看高清视频
视频下载器
RI Seminar - The Role of Manipulation Primitives in Building Dexterous Robotic
RI Seminar_ Ankur Mehta _ Towards $1 robots
RI Seminar- Leila Bridgeman - Distributed Dissipativity- Applying Foundational S
RI Seminar- Kevin Lynch - Robotics and Biosystems
RI Seminar- Cynthia Sung - Dynamical Robots via Origami-Inspired Design
Stanford Seminar - Representation Learning for Autonomous Robots
Bioinspired and biohybride approaches towards life-like and living robots
RI Seminar-Safe and Stable Learning for Agile Robots without Reinforcement Learn
Stanford Seminar - Humanizing Robot Design, Aaron Edsinger of Hello Robot
Deploying Autonomous Service Mobile Robots, And Keeping Them Autonomous
“Magnetic Surgical Robots: A “Fantastic Voyage” deep inside the human body
Russ Tedrake : Motion Planning Around Obstacles with Graphs of Convex Sets
Jodi Forlizzi-Designing Human Interaction with Agents and Robots
ICRA2020 Workshop - Learning of Manual Skills in Humans and Robots
[ECC2021] Workshop on Model-based Control of Soft Robots
Bioinspired and biohybrid approaches towards life-like and living robots
ONLINE Lockheed Martin Robotics Seminar, November 13, 2020- Dezhen Song
Fall 2023 GRASP SFI - Autonomy for insect-scale robots
SPRING 2022 GRASP Seminar - Robert J. Wood, Harvard University
Generic and Generalizable Manipulation Skill Benchmarking and Learning - Hao Su
IROS 2020 Soft Wearable Robots for Assistance and Rehabilitation
Biorobotics for Personal Assistance
Robotics Pathways & Careers- Kimberly Hambuchen, NASA
The robots of the future - Dennis Hong - TEDxManhattanBeach
威震天变形机器人!还可以发射炮弹!
Contact models for the design of robotic grasping and manipulation_ Hannah Stuar
ICRA2021 Plenary Talk -- Medical Capsule Robots - A Fantastic Voyage
Justin Yim, University of Illinois, -Small Robots Traversing the World at Large
Soft Talk - Electroionic Artificial Muscles for Biomedical Soft Robots - Manmath
Robotics inspired by Nature
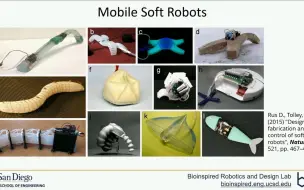
Biologically Inspired Soft Mobile Robots, September 16, 2022_ Michael T. Tolley
MIT RoboSeminar - Oliver Brock - Why I Believe That AI-Robotics is Stuck
Lessons from the field - Deep learning and Machine perception for field robots
Contact-rich robotics: learning, impact-invariant control, and tactile
ICRA2020 Workshop on Sensing, Estimating and Understanding
Allison Mariko Okamura-Wearable Haptic Devices for Ubiquitous Communication
Ameca conversation using GPT 3 - Will robots take over the world
Towards Adaptive Human-Robot Teams Workload Estimation - Julie Adams, Oregon Sta
Robot Imagination_ Affordance-Based Reasoning Unknown Objects
Understanding the Utility of Haptic Feedback in Telerobotic Devices