V
主页
机器人学导论 期末速成
发布人
课本答案链接:(答案不可完全相信,里面有些缺少和错误的地方) https://www.doc88.com/p-0903882586718.html 希望大家都能取得理想的成绩。
打开封面
下载高清视频
观看高清视频
视频下载器
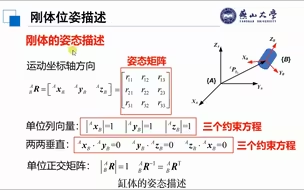
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)
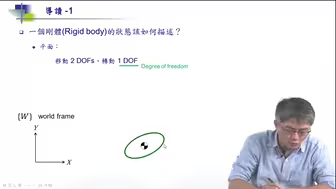
2-1位置和姿态的表示
工业机器人组成
机器人学期末速成
4-2机器人速度雅克比矩阵与速度分析
机器人学 3.2 拉格朗日动力学算法(Lagrangian mechanics)
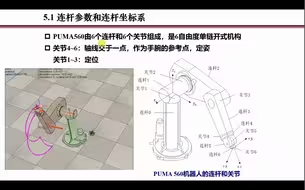
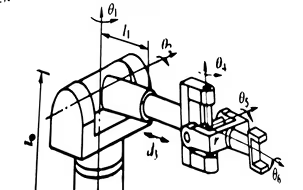
机器人学 l 3.2 连杆变换和运动学方程(正向运动学)
机器人运动控制简明教程 第三节 雅可比矩阵
机器人学导论 MOOC
机器人机构学 期末复习
【东北大学】机器人基础原理_(房立金教授)
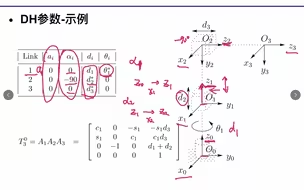
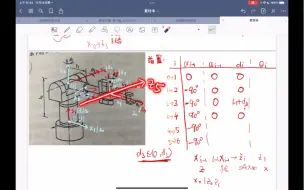
空间机器人技术-建模与控制基础:13.DH参数举例
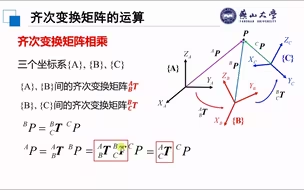
机器人学 | 2.3 齐次变换矩阵及其三重物理意义
机器人DH法、运动学、雅克比(Jacobian)矩阵
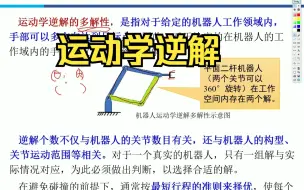
3-11运动学逆解
MATLAB机器人工具箱10.4 机械臂仿真教学(未完结)
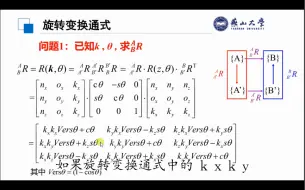
机器人学 l 2.6 旋转变换通式(等效转轴与等效转角)
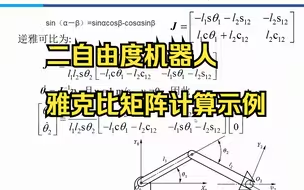
4-3二自由度机器人雅克比矩阵计算示例
2-2坐标变换
(完)自主移动机器人--浙大
机器人 运动学 D-H经典方法和改进D-H方法参数表建立
【机器人机构学】DH参数法讲解-基于定义出发
《机器人学》期末速成课资源
机器人学导论 林沛群 (长视频版)
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
终于来了,机器人学习路线经验分享!华理学长毫无保留分享~
【机器人机构学】第二章数学基础填空知识点与部分习题
机器人学 l 2.5 姿态描述方法:RPY角和欧拉角
机器人学 | 2.4 齐次变换矩阵的运算(矩阵相乘与矩阵求逆)
600个小时,一个普通大学生能做出怎样的毕设
斯坦福公开课【机器人学导论】全网最好!最详细!最干!的机器人学导论!学完及入门,原著作者亲自录制!膜拜!——(人工智能、深度学习、神经网络、机器学习)
4-1机器人速度雅可比矩阵
【机器人学】tt的机器人学导论实验仿真大作业
想搞机器人,学什么专业最好!
机器人建模和控制
6-1路径描述及轨迹生成
(1)概述|空间位置、姿态的描述(3×3)|《动手学机器人学》
数字电子技术基础期末复习速成(0基础逆袭90+)
斯坦福大学公开课——机器人学