V
主页
【机器人机构学】DH参数法讲解-基于定义出发
发布人
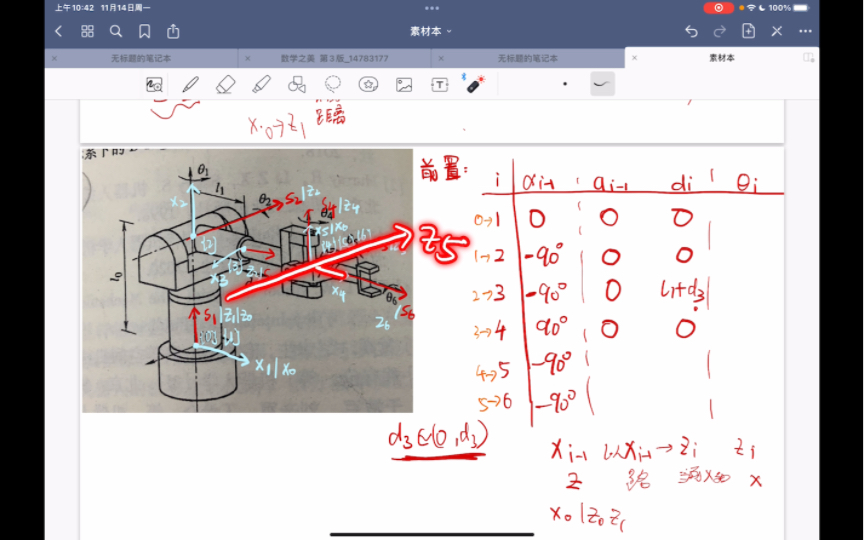
自己根据DH坐标系的定义整理的一套方法,如果不对还请批评指正!大佬轻喷!公众号“太理老学长”上有很多笔记,欢迎参考!
打开封面
下载高清视频
观看高清视频
视频下载器
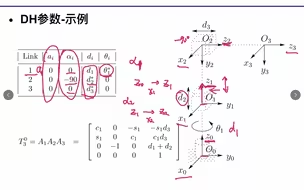
空间机器人技术-建模与控制基础:13.DH参数举例
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
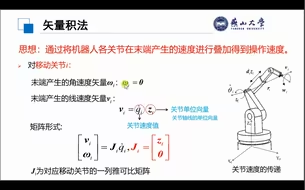
机器人学 l 3.6 速度雅可比矩阵的矢量积法
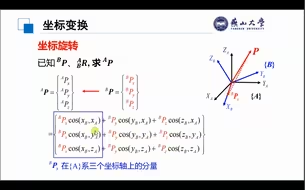
机器人学 l 2.2 坐标变换
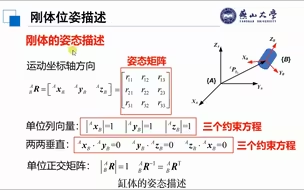
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
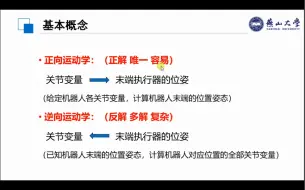
机器人学 l 3.3机器人逆向运动学(以puma560为例)
(10)标准DH参数详解+案例分析【1】|《动手学机器人学》
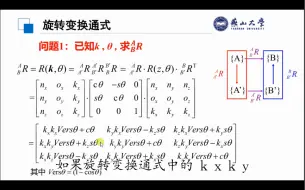
机器人学 l 2.6 旋转变换通式(等效转轴与等效转角)
空间机器人技术-建模与控制基础:12.DH坐标系与DH参数
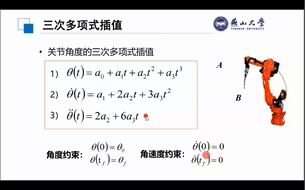
机器人学 l 7.2 轨迹规划中的三次多项式插值
机器人学 l 3.5 速度雅可比矩阵的位置求导法
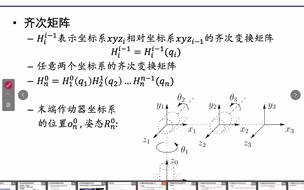
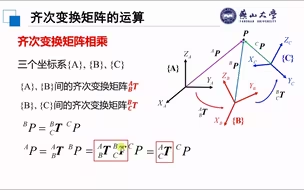
机器人学 | 2.4 齐次变换矩阵的运算(矩阵相乘与矩阵求逆)
机器人学 l 3.2 连杆变换和运动学方程(正向运动学)
机器人学 l 2.5 姿态描述方法:RPY角和欧拉角
机器人学 l 3.4 逆向运动学相关的三方面问题
机器人学 l 3.1 连杆参数和关节变量
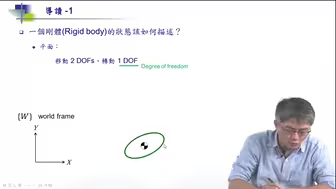
3-1DH法的目标
《动手学机器人学》开课了
机器人机构学 期末复习
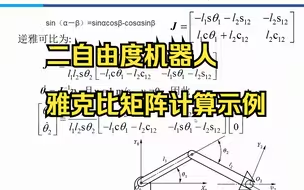
4-3二自由度机器人雅克比矩阵计算示例
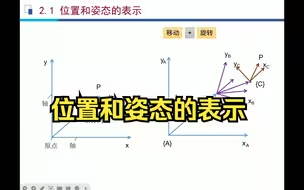
2-1位置和姿态的表示
空间机器人技术-建模与控制基础:3.旋转矩阵(坐标转换矩阵)
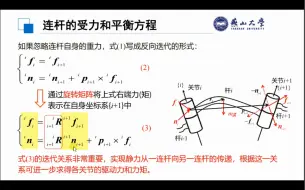
机器人学 l 3.7 连杆的受力与平衡方程
【机器人机构学】第三章位形空间与刚体运动
机器人学导论例3.3及例3.6
【机器人机构学】第二章数学基础填空知识点与部分习题
六自由度工业机器人DH建模与逆运动学仿真
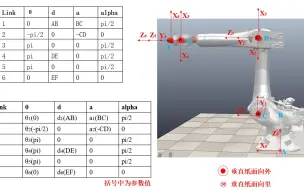
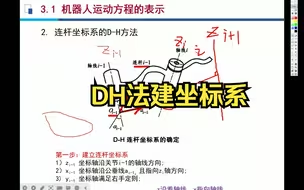
3-3DH法建坐标系
3-13Matlab机器人工具箱的使用和DH建模方法回顾
机器人原理及应用(搬运)
机器人学 1.22 用改进DH参数建模Aubo机器人
3-9改进的DH方法实例:3自由度机械手
3-19六自由度机器人Matlab机器人工具箱建模
机器人技术基础(1)
6自由度并联机器人反解
【中英字幕】现代机器人学 | Modern Robotics
补充2.3_空间机器人技术-动力学与控制-DH坐标系与DH参数
【第2部分】机器人动力学
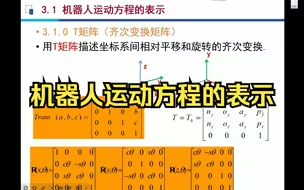
3-2机器人运动方程的表示
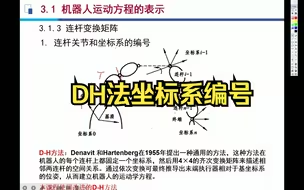
3-2DH法坐标系编号