V
主页
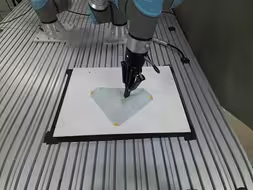
机械臂抓取实验
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
小到U盘,大到石头,万物可抓的平面抓取检测算法
GraspNet仿真抓取测试
MRLNM 非抓取的物体操作方法
UR5e抓取测试
使用pybullet进行仿真抓取
使用spacemouse遥控机械臂实现物体操作
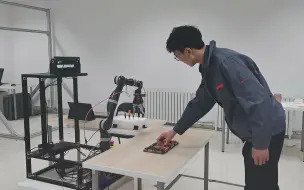
AFFGA-Net 机器人抓取实验
机器人抓取实验2
终于把机械臂从车上拆下来了……
6DOF抓取方法graspnet-1Billion测试
使用真实ur机械臂在Robosuite环境中收集轨迹
机器人抓取检测(demo)
抓取位姿计算及仿真抓取测试
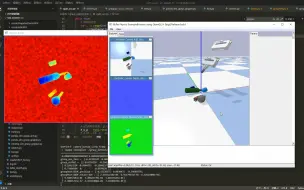
on-policy 机器人抓取,性能超越Dex-Net
Hierarchical Diffusion Policy 实机实验
Dex-Net 2.0 抓取位姿测试
前方高能,这27个变态AI,一定要偷偷用起来!
语音控制机器人抓取
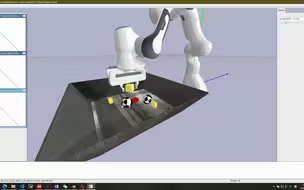
基于强化学习的物体灵巧操作 --- GraspLeanTilt场景测试
pybullet仿真抓取
基于强化学习的物体灵巧操作 --- GraspLieRaise场景测试
新算法的抓取演示
CMU Cheng Xianyi 机械臂灵巧操作 讲座视频
当你拥有一个掌上ai玩具,你会带他出门吗
人机协作演示-安装零件
机器人男友,人手一只
人机协作-搬箱子
“抓娃娃机” 2.0
Booster13 下沉
机器人抓取-抓取单物体
基于扩散模型的可变形物体操作(布料展平)
通过简单的动作识别来控制机器人
Dex-Net 2.0_1
Dex-Net 3.0
39.多智能体强化学习进阶
Dex-Net 2.0_2
老人机的六大特征
第一个强化学习算法-hopper-v2
7x24监控你的电脑,老板看了都想装的AI神器!