V
主页
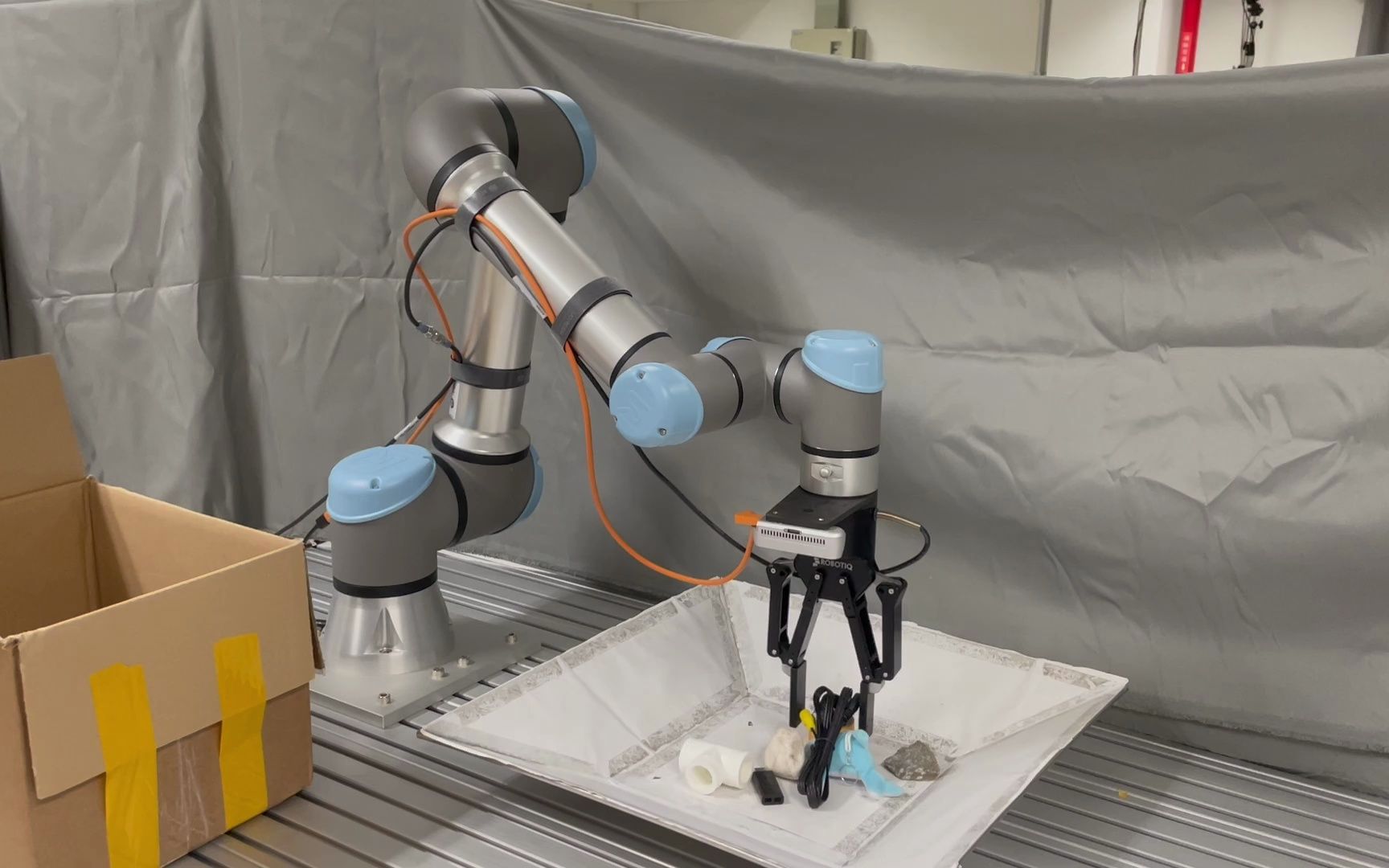
UR5e抓取测试
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
GraspNet仿真抓取测试
6DOF抓取方法graspnet-1Billion测试
使用真实ur机械臂在Robosuite环境中收集轨迹
小到U盘,大到石头,万物可抓的平面抓取检测算法
《关于大一新生做的抓取物体机械臂这档事》
使用spacemouse遥控机械臂实现物体操作
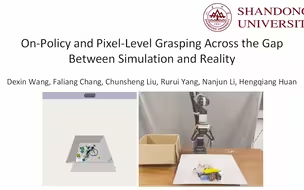
on-policy 机器人抓取,性能超越Dex-Net
如何用706.9元做一个高精度的机械臂?
机械手爬行
Hierarchical Diffusion Policy 实机实验
端到端机械臂视觉抓取无人配送的场景演示
使用spacemouse遥控UR5e完成零件装配任务
新算法的抓取演示
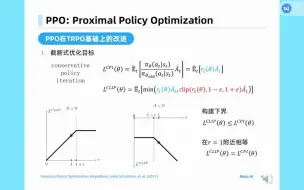
25.PPO
使用pybullet进行仿真抓取
MRLNM 非抓取的物体操作方法
Dex-Net 2.0 抓取位姿测试
机械臂抓取实验
抓取位姿计算及仿真抓取测试
微型六轴机械臂测试
GraspNet Top-50抓取测试
把我机械臂用到的谐波减速器分享给大家
来看一下这个706块的开源机械臂的开源上位机吧
pybullet仿真抓取
智在臂得,3D深度视觉机械臂轻松搞定三维空间环境感知,体积测算、空间抓取,简直超酷!
机器人抓取检测(demo)
基于stm32和openmv的视觉机械臂.
全网最低成本—具身智能机械臂+实操课程
【真机演示】CrossDex:跨具身抓取,用一个策略控制任意的灵巧手
基于强化学习的物体灵巧操作 --- GraspLeanTilt场景测试
“抓娃娃机” 2.0
力反馈手套在遥操作方案中的应用
语音控制机器人抓取
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
机械臂动作状态机演示
机器人开门 - science robotics - 日本早稻田大学
还是齿轮减速靠谱,机械臂写3毫米汉字
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
CMU Cheng Xianyi 机械臂灵巧操作 讲座视频
基于强化学习的物体灵巧操作 --- GraspLieTilt场景测试