V
主页
京东 11.11 红包
Hierarchical Diffusion Policy 实机实验
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
on-policy 机器人抓取,性能超越Dex-Net
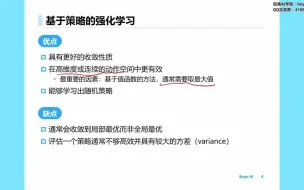
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
小到U盘,大到石头,万物可抓的平面抓取检测算法
6DOF抓取方法graspnet-1Billion测试
CMU Cheng Xianyi 机械臂灵巧操作 讲座视频
机器人抓取检测(demo)
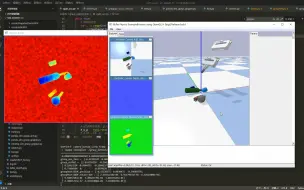
GraspNet仿真抓取测试
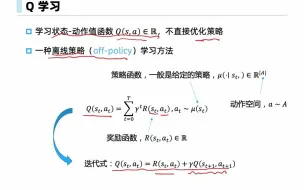
12.Q学习算法及其收敛性
【科普报告视频分享】西安交通大学兰旭光教授:基于视觉推理与学习的机器人自主作业
1.强化学习简介
ur5e-realsensed435i-眼在手外手眼标定
语音控制机器人抓取
MRLNM 非抓取的物体操作方法
32.生成式对抗模仿学习
Aloha-ACT 在单臂上模仿学习仿真系统(基于Coppliasim+RLBench)
29.模仿学习
基于深度学习的“自动抓娃娃机”
基于强化学习的物体灵巧操作 --- GraspLeanTilt场景测试
使用pybullet进行仿真抓取
使用spacemouse遥控机械臂实现物体操作
终于把机械臂从车上拆下来了……
机器人开门 - science robotics - 日本早稻田大学
机器人协助打开柜门
“抓娃娃机” 2.0
机器人抓取-抓取单物体
机器人抓取实验2
6-DOF GraspNet_ Variational Grasp Generation for Object Manipulation
3.马尔科夫决策过程
16.策略梯度
21.深度强化学习
30.行为克隆
CVPR2024|中科院、国科大等五大单位联合推出残差去噪扩散模型(RDDM):一种用于图像复原和图像生成的统一扩散模型
机械臂抓取实验
Spring 2022 GRASP on Robotics - Jing Xiao -(宾夕法尼亚大学GRASP实验室)
28.最大熵强化学习:soft Q-learning & Soft Actor Critic
GGCNN-closing the loop for robotic grasping a real time generative grasp
基于强化学习的物体灵巧操作 --- GraspLieTilt场景测试
23.A3C
【研2基本功 Score-based Diffusion 2】手搓Diffusion SDE,CCF-A向你招手
Isaac Sim - NVIDIA 机器人模拟器