V
主页
ROS 航点导航功能的 Python 实现
发布人
介绍如何在机器人操作系统 ROS 中,使用 Python 编程实现航点导航功能。
打开封面
下载高清视频
观看高清视频
视频下载器
【鱼香ROS】动手学ROS2|ROS2基础入门到实践教程|小鱼带你手把手学习ROS2
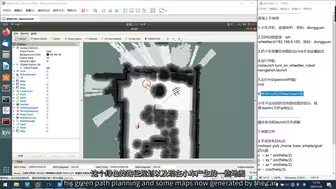
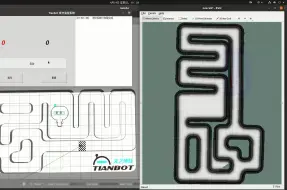
如何使用Gmapping进行SLAM建图
二、ROS小车视频教程
什么是SLAM
ROS2 哪里难啦?!
自制局部规划器 | 狂暴模式
ROS导航系统 | DWA规划器 | DWA Planner
Hector_Mapping 年轻人的第一次SLAM建图
16.在ROS中,使用Python编写Publisher发布者节点
11.初学ROS,年轻人的第一个Node节点
ROS 颜色目标识别与定位的 C++ 实现
APT源,ROS的软件包应用商店
49.Gmapping建图的参数设置
一款开源的 ROS 航点导航插件
ROS导航系统 | AMCL 定位算法
机器人操作系统ROS的安装心得以及rosdep问题的处理
ROS快速入门教程
学习ROS,安装Ubuntu,虚拟机和双系统如何选择
ROS导航系统 | 代价地图 Costmap
8.ROS 开发神器 Visual Studio Code 的安装和设置
ROS 人脸检测的 C++ 实现
20. 在ROS中,使用Python编写运动控制功能
在Github上寻找安装ROS软件包
ROS 坐标导航的 C++ 编程实现
18.ROS机器人运动控制
机器人操作系统 ROS 快速入门教程
15.在ROS中,使用launch文件一次启动多个节点
自制局部规划器 | 地图 raicom
从没接触过Ubuntu,如何上手ROS开发
零基础,如何学习机器人操作系统ROS
如何在 ROS 中保存和加载地图
move_base,年轻人的第一次导航
Windows11 安装 Ubuntu 避坑指南
ROS导航系统 | 代价地图的参数设置
10.ROS的基础单元:Node节点和Package包
ROS导航系统 | 全局规划器
ROS 坐标导航的 Python 编程实现
你这 ROS2 保 熟 吗 ?
Windows 和 Ubuntu 双系统的安装和卸载
ROS导航系统 | 恢复行为的参数设置 | Recovery Behaviors