V
主页
ROS Moveit桌面机械臂进阶视频教程(一)|Urdf标签讲解
发布人
ROS Moveit桌面机械臂进阶视频教程上线,带你走进更深层的Moveit知识世界!
打开封面
下载高清视频
观看高清视频
视频下载器
ROS Moveit桌面机械臂进阶视频教程(三)|Rviz界面Motion_Planning插件讲解
ROS Moveit桌面机械臂进阶视频教程(四)|Move_Group_Interface C++部分函数讲解
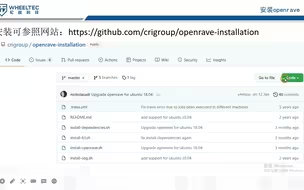
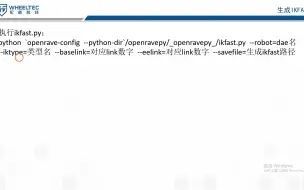
ROS Moveit桌面机械臂进阶视频教程(七)|IKfast配置讲解第一部分
/* 这屎是我写的 */ 摘自Linux源码注释
室外ROS 深夜调车,一鼓作寄
ROS入门系列教程(四)——如何把ROS和STM32联系起来(WHEELTEC)
机械臂自适应导纳恒力按摩,姿态顺应曲面
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
基于yolo和moveit的图像识别机械臂目标抓取搬移
通过英文ROS wiki快速入门ROS教程(一)|ROS wiki简介
桌面机械臂移动抓取 教学测试
视觉组 | 搓出了第1版使用 ROS2 + YOLO v8 的自瞄
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
体验最强国产 CodeArts IDE 开发 C/C ++,替代VScode jetbrains
阿里开源的Druid,究竟有多大本事?
[ns] 带重力的桌面:Vulkan Wayland合成器
使用Isaac Sim+ROS2初步实现机械臂的Sim2Real
ROS入门系列教程|WHEELTEC
ROS Moveit桌面机械臂进阶视频教程(五)|Moveit_Config参数讲解第一部分
2024全新版C++零基础入门到精通全套视频教程,从入门到实战就业一套通关!
机械手快完善了,该是时候搞别的东西啦
性能比肩REALSENSE D435,轮趣科技联合奥比中光推出Gemini Pro双目深度相机
ROS Moveit桌面机械臂进阶视频教程(八)|IKfast配置讲解第二部分
机器人竞赛基础技术讲解(1)-9月13日
【首次开源】在RK3588上使用C++结合yolov8+bytetrack实现目标追踪
盘点那些有趣的开源机械臂13
不知这个定位精度能否对标MID360
ROS Moveit!机械臂小车功能演示(WHEELTEC)
2025年中国大学生工程实践与创新能力大赛,机械臂从虚拟到现实了
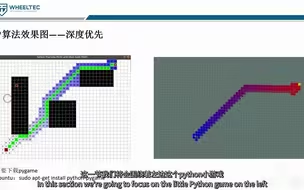
ROS 2D导航原理系列(五)|全局路径规划-Astar
ROS入门系列教程(三)——ROS话题(WHEELTEC)
基于力控的机械臂曲面自适应贴合移动
ROS麦轮系列机器人功能演示(WHEELTEC)
01_案例展示
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
ROS入门系列教程(六)——rqt可视化工具集(WHEELTEC)
【开源无人机】从零调试一架开源无人机
【毕设日记 01】机械臂搭好了,下次更新就是明年了
建议厨子找我们拍iPhone广告!
ROS Moveit桌面机械臂进阶视频教程(六)|Moveit_Config参数讲解第二部分