V
主页
ROS Moveit桌面机械臂进阶视频教程(四)|Move_Group_Interface C++部分函数讲解
发布人
ROS Moveit桌面机械臂进阶视频教程第4期内容——Move_Group_Interface C++部分函数讲解 本期内容给大家讲解控制机械臂的部分C++函数,了解常用函数的一些使用与注意事项。
打开封面
下载高清视频
观看高清视频
视频下载器
ROS Moveit桌面机械臂进阶视频教程(三)|Rviz界面Motion_Planning插件讲解
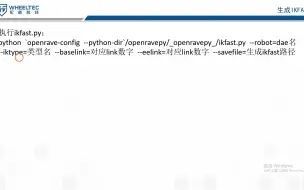
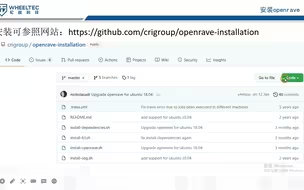
ROS Moveit桌面机械臂进阶视频教程(八)|IKfast配置讲解第二部分
《松灵ROS 2开讲啦》第8期 机械臂的使用
ROS2功能系列视频教程 (三)| ROS2gmapping建图
ROS Moveit桌面机械臂进阶视频教程(七)|IKfast配置讲解第一部分
ROS2功能系列视频教程 (六)| ROS2 2D导航
机器人竞赛基础技术讲解(1)-9月13日
ROS2功能包与三大通信机制编程
ROS2功能系列视频教程 (五)| ROS2 cartographer建图
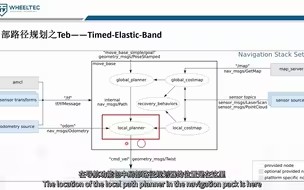
ROS 2D导航原理系列(七)|局部路径规划-TEB算法
通过英文ROS wiki快速入门ROS教程(一)|ROS wiki简介
ROS 2D导航原理系列(五)|全局路径规划-Astar
ROS2入门系列视频教程 (二)| ROS2体系框架
ROS入门系列教程(一)——工作空间与功能包(WHEELTEC)
【开源无人机】零基础首飞一架开源无人机
ROS 2D导航原理系列(二)|自适应蒙特卡罗定位AMCL
深度学习系列教程|07训练自己的数据集及在ROS端使用
ROS2功能系列视频教程 (九)| ROS2视觉跟随
ROS入门系列教程(六)——rqt可视化工具集(WHEELTEC)
ROS入门系列教程(八)——TF坐标变换(WHEELTEC)
【开源无人机】从零调试一架开源无人机
通过英文ROS wiki快速入门ROS教程(二)|ROS部分讲解
ROS2功能系列视频教程 (十)| ROS2 WEB浏览器监控
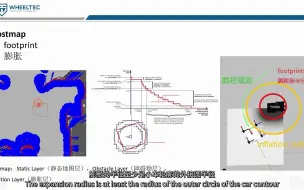
ROS 2D导航原理系列(一)|Costmap
ROS2功能系列视频教程 (十二)| ROS2 KCF跟随
ROS2入门系列视频教程 (一)| ROS2概述
盘点那些有趣的桌面机械臂6
ROS入门系列教程(二)——launch文件与参数服务器(WHEELTEC)
制作人形机械臂(二)
拜托三连了!这绝对是全B站最用心(没有之一)的VPN学习教程,耗时千余小时开发!
ROS2入门系列视频教程 (五)| rviz2数据可视化工具
轮趣科技联合奥比中光推出首款3D视觉机器人开发套件
【新品上市】超迷你尺寸,底盘轻量化升级!轮趣科技推出开源复合机器人S300 Mini
激光SLAM的入门讲解视频教程(三)|liosam原理框架讲解
ROS2入门系列视频教程 (十一)| ROS2其他通信类型的使用
开源6自由度机械臂
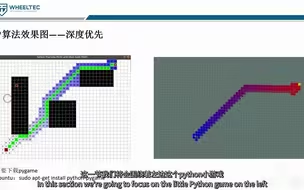
24.游戏检测与过检测
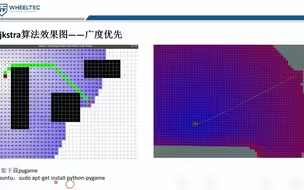
ROS 2D导航原理系列(四)|全局路径规划-Dijkstra算法
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
ROS2功能系列视频教程 (七)| ROS2雷达跟随