V
主页
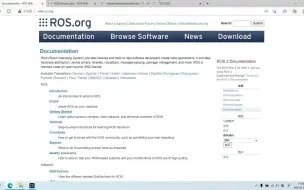
通过英文ROS wiki快速入门ROS教程(一)|ROS wiki简介
发布人
带你通过ROS wiki入门ROS,起飞!
打开封面
下载高清视频
观看高清视频
视频下载器
通过英文ROS wiki快速入门ROS教程(二)|ROS部分讲解
通过英文ROS wiki快速入门ROS教程(三)|ROS基础入门概念(1)
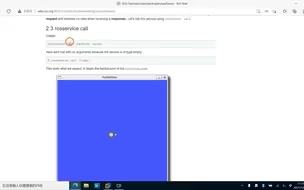
通过英文ROS wiki快速入门ROS教程(七)|使用ROS-tutorials学习服务与参数
通过英文ROS wiki快速入门ROS教程(八)|ROS wiki直接跳转方式(以launch为例)
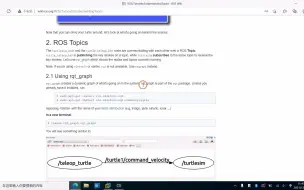
通过英文ROS wiki快速入门ROS教程(六)|使用ROS-tutorials学习话题
激光SLAM的入门讲解视频教程(一)|SLAM简介
ROS 2D导航原理系列(二)|自适应蒙特卡罗定位AMCL
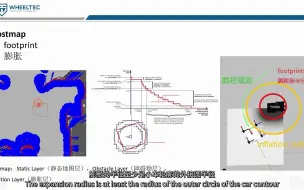
ROS 2D导航原理系列(一)|Costmap
通过英文ROS wiki快速入门ROS教程(五)|使用ROS-tutorials学习节点
通过英文ROS wiki快速入门ROS教程(四)|ROS基础入门概念(2)
ROS入门系列教程(三)——ROS话题(WHEELTEC)
ROS入门系列教程(四)——如何把ROS和STM32联系起来(WHEELTEC)
ROS入门系列教程(八)——TF坐标变换(WHEELTEC)
ROS入门系列教程(六)——rqt可视化工具集(WHEELTEC)
ROS 2D导航原理系列(三)|全局路径规划-概述
ROS入门系列教程|WHEELTEC
ROS入门系列教程(二)——launch文件与参数服务器(WHEELTEC)
ROS入门系列教程(一)——工作空间与功能包(WHEELTEC)
ROS入门系列教程(五)——ROS传感器介绍(WHEELTEC)
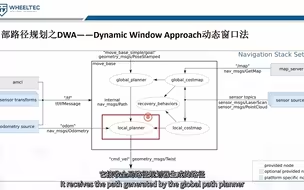
ROS 2D导航原理系列(六)|局部路径规划-DWA算法
ROS 2D导航原理系列教程合集(WHEELTEC)
ROS Moveit桌面机械臂进阶视频教程(一)|Urdf标签讲解
ROS 2D导航原理系列(五)|全局路径规划-Astar
深度学习系列教程|01深度学习和yolov3简介
ROS Moveit桌面机械臂进阶视频教程(五)|Moveit_Config参数讲解第一部分
ROS Moveit桌面机械臂进阶视频教程(三)|Rviz界面Motion_Planning插件讲解
ROS Moveit桌面机械臂进阶视频教程(二)|Moveit_Setup_Assistant配置讲解
ROS阿克曼系列机器人功能演示(WHEELTEC)
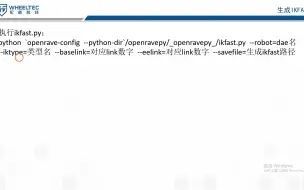
ROS Moveit桌面机械臂进阶视频教程(七)|IKfast配置讲解第一部分
ROS入门教程系列(七)——ROS多机通信设置(WHEELTEC)
ROS Moveit桌面机械臂进阶视频教程(六)|Moveit_Config参数讲解第二部分
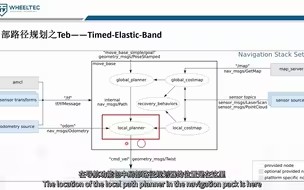
ROS 2D导航原理系列(七)|局部路径规划-TEB算法
ROS2功能系列视频教程 (二)| ROS2键盘控制
深度学习系列教程|07训练自己的数据集及在ROS端使用
ROS Moveit桌面机械臂进阶视频教程(四)|Move_Group_Interface C++部分函数讲解
ROS麦轮系列机器人功能演示(WHEELTEC)
激光SLAM的入门讲解视频教程(五)|liosam工程实现和代码模块讲解(下)
WHEELTEC推出全新ROS多机编队功能——基于镭神智能M10雷达
ROS2功能系列视频教程 (一)| ROS2小车上手操作
ROS Moveit桌面机械臂进阶视频教程(八)|IKfast配置讲解第二部分