V
主页
可部署机器人系统
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
机器人空间感知基础
机器人学习中的收缩理论
AI与3D生成
机器人学习中运动表示
自适应协作机器人
从物理系统中学习的欧几里得神经网络E(3)NN
利用结构实现高效灵活的机器人接触操作
通用机器人路径思考:scaling law、数据飞轮和具身智能
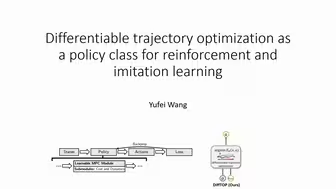
可微轨迹优化作为强化和模仿学习的策略表示
开源通用机器人构建
基于优化的敏捷足式机器人控制与规划
为什么需要建立机器人学徒但不单独做?
通过扩散策略进行机器人灵活操作
家庭通用机器人
RLBench机器人模仿学习大规模测试框架——任务展示
足式机器人的视觉全身操控与运动
机器人控制的不同鲁棒性观点
通过第一人称视频进行机器人学习
Tiny Robots - 微型机器人
MIT机器人操作Lecture 2
阿里大规模计算集群网络稳定性的挑战与实践
MIT Robotics:折纸结构和柔性机器人的计算机设计过程
高分辨率触觉感知在反应式机器人操作中的应用
亚马逊电商中的机器人
GPT-4V应用于机器人视觉语言规划
RLOO,新的在线RLHF训练算法
Ray Summit 2024,Apple弹性GPU资源管理
数字实验室做机器人及模拟机器人开发
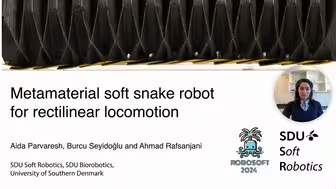
超材料类蛇直线运动机器人
Vision与3D
用于近存计算的DPU加速Peta Scale存储系统
3D合成数据
Stanford CS234 Reinforcement Learning,RLHF&DPO
基于模仿学习的机械臂复杂任务实验
非稳态环境中的安全RL:理论与算法
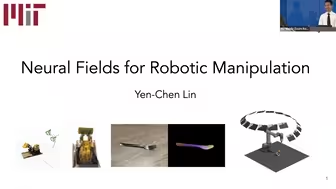
神经场在机器人操作中的应用
[北理AI分享] 亿点点机器人 Stanford ALOHA的背后
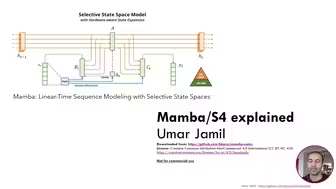
Mamba和S4解读:架构、并行扫描、内核融合、循环、卷积、数学
ICRA2024 LHMP研讨会:Isn't Motion Prediction just Model-based RL?
Stanford CS25: Robotics and Imitation Learning