V
主页
京东 11.11 红包
可微轨迹优化作为强化和模仿学习的策略表示
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
MPC+强化学习!Actor Critic模型预测控制,苏黎世大牛教授人类水平性能的自主视觉无人机演讲
通用机器人路径思考:scaling law、数据飞轮和具身智能
从物理互动中学习结构化世界模型
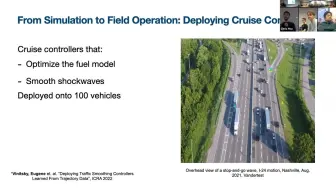
多智能体系统中的真实世界强化学习:大规模自主合作性部署
Aloha-ACT 在单臂上模仿学习仿真系统(基于Coppliasim+RLBench)
下一代机器人感知:3D场景图,可验证算法,自监督学习
主动和可解释家用机器人设计
Berkeley EECS研讨会讨论:Future of Robotics
Robotics in the Age of Generative AI
机器人中的数值方法
神经场在机器人操作中的应用
ICRA2024 LHMP研讨会:Isn't Motion Prediction just Model-based RL?
开源通用机器人构建
迈向机器人多智能体系统中大规模合作学习
向着大型行为模型发展:通过监督学习实现多功能和灵巧的机器人
MIT Robotics:折纸结构和柔性机器人的计算机设计过程
Jim Fan 谈 Nvidia 的 Embodied AI Lab 以及老黄关于所有机器人都将实现自主预测
家庭通用机器人
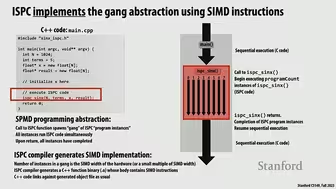
Stanford CS149 并行计算,Cache Coherence 11
Dynamics on Neural Networks
基于意图和故障的轨迹预测,用于协同定位和防碰撞
机器人空间感知基础
通过第一人称视频进行机器人学习
MIT Robotics:灵活多模态机器人工具使用
通过学习规划和感知进行任务和运动规划
足式机器人的视觉全身操控与运动
机器人可达性研究
自适应触觉控制接口,用于保护炼钢环境中的机器人远程操作
为什么需要建立机器人学徒但不单独做?
多决策智能体的运动规划——上海交大董伟老师与荷兰代尔夫特理工Javier老师深度讨论
自适应协作机器人
SynH2R:合成的手-物体运动以学习人机间物体传递
以人为中心的机器人以及学习如何实现通用性
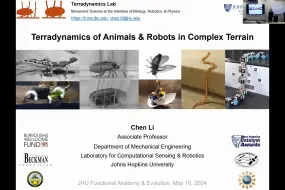
复杂环境中的机器人运动
Stanford CS149 并行计算,并行计算基础 4
复杂室内外环境中的机器人导航
在安全关键系统中的不确定性规划
[HOTI2024] DL集合算法的标准表示
Stanford CS149 并行计算,Transactional Memory 17
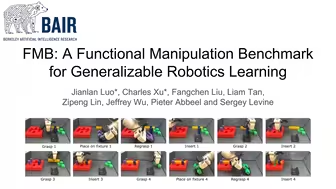
FMB:泛化机器人学习的功能性操作基准