V
主页
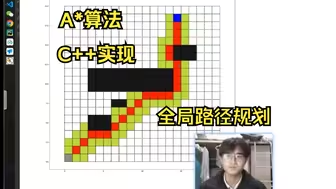
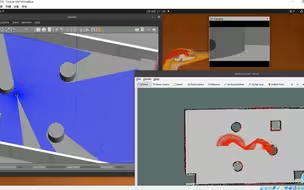
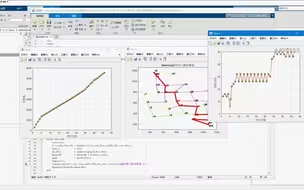
开源!基于A*的路径规划算法(ROS/Python/Matlab实现)
发布人
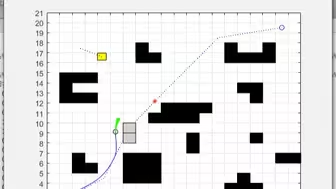
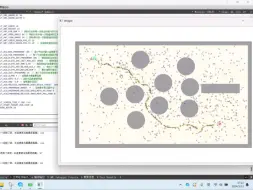
A*算法是非常有效且常用的路径规划算法之一,其是结合Dijsktra算法与贪婪最佳优先算法各自优势的启发式搜索算法。本视频展示了基于ROS C++/Python/Matlab实现的A*算法效果,开源地址见评论区
打开封面
下载高清视频
观看高清视频
视频下载器
【ROS】使用Gmapping算法建图与A*路径规划算法导航的智能小车,GUI界面显示
路径规划matlab全集
D* Dstar 路径规划 未知突然出现障碍物 动态规划规划
四轮小车导航规划,快速全局路径规划和局部路径规划,可以实现倒车规划,动态避障
Cartographer-SLAM建图 与 动态权重A*的路径规划
路径规划与轨迹跟踪系列算法学习_第4讲_A*算法
gazebo仿真ros小车路径规划与避障
在Gazebo仿真环境下基于ROS的自动驾驶小车
HybridAstar原理、改进、技巧、代码实现、开源项目推荐和解读、应用案例
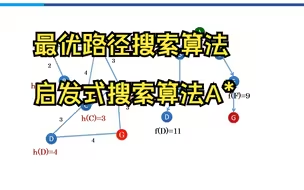
4-16最优路径搜索算法-启发式搜索算法A星
路径规划与轨迹跟踪系列算法学习_第1讲_Dijkstra算法
【Python】路径规划——Dijkstra算法
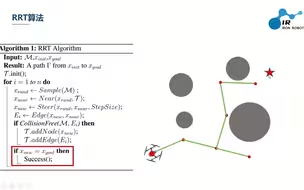
开源!基于RRT的路径规划(ROS C++/Python/Matlab仿真)
A星算法C++实现及详解,自动驾驶全局路径规划astar算法
基于ROS的轮式机器人路径规划效果演示
ROS 自主建图导航小车
基于Qlearning强化学习的路径规划算法matlab仿真
丁帧教你ROS基于Gazebo实现机器人自动路径规划和视觉识别
A星寻路算法详解(下)_matlab代码实现(超详细!)
路径规划第一弹,栅格地图生成
本科毕业设计-基于ROS的语音控制移动抓取机器人
【论文代码复现11】python遗传算法求解VRP路径运输规划问题||耗时24小时,纯手撸代码||使用精英保留优化算法
自己写的路径规划算法[qyh_controller]
三种简单路径规划算法,适合初学者B6
路径规划算法 A*和人工势场融合 动态路径规划
多机器人协同路径规划算法
MATLAB联合ROS验证纯路径跟踪算法
【ROS无人车教学视频大全】免费分享,允许白嫖!一次性教会你做ROS无人小车!附课件解析!!
机器人路径规划、轨迹优化课程-第五讲-RRT算法原理和代码讲解
ROS小车
[附代码]A*算法&Dijkstar算法对比可视化及操作
聚类 + 循迹 + 避障 + 路线跟踪
路径规划算法 改进A*和改进动态窗口融合算法 Astar 动态窗口法 Matlab
基于Qt开发的路径规划仿真平台,并实现蚁群算法演示
路径规划算法比较:Dijkstra VS A星算法
GPS导航小车,自主导航,避障,路径规划,stm32,esp8266,pid。GPS导航小车,小车可自主到达目的地,具有一定的避障和路径规划能力。
【论文代码复现42】从0开始复现【路径规划带经纬度】遗传算法求解
基于ROS的全覆盖路径规划算法
基于粒子群算法的ROS全局路径规划器(开源)
A星算法融合人工势场法APF 动态路径规划 Astar 算法引导 apf 路径规划 A* 算法 混合算法 动态避障 astar算法提供子目标点 避免规划路径冗长