V
主页
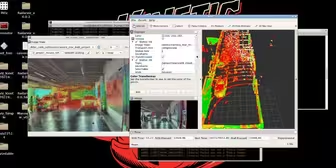
丁帧教你ROS基于Gazebo实现机器人自动路径规划和视觉识别
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
【ROS】使用Gmapping算法建图与A*路径规划算法导航的智能小车,GUI界面显示
gazebo仿真ros小车路径规划与避障
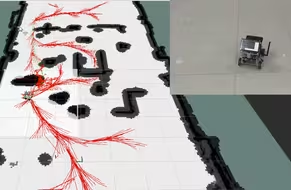
复杂环境下的实时路径规划
Gazebo仿真环境下的小车使用ROS实现识别及导航
自己写的路径规划算法[qyh_controller]
什么是SLAM
Unitree 2023 ROS暑期学校课程视频01-搭建Gazebo仿真环境玩转四足机器人(上)
我的毕设演示:基于激光雷达的智能巡检小车
【路径规划Gazebo仿真】自适应DWA与传统DWA路径规划效果对比
开源!基于A*的路径规划算法(ROS/Python/Matlab实现)
本科毕设视频(2022.1-2022.5)补发(二): 未知动态环境下移动机器人运动规划算法设计与实现-规划过程可视化演示版
ROS机器人未知环境自主探索大地图测试效果演示
Gazobo仿真环境下的自动驾驶小车
开源!基于RRT的路径规划(ROS C++/Python/Matlab仿真)
基于PSO和LQR算法的ROS局部路径规划器(开源)
unitree b1/a1四足机器人纯MPC控制gazebo仿真,验证学习过程中MPC、状态估计和姿态估计
在Gazebo仿真环境下基于ROS的自动驾驶小车
ROS 经典项目 racecar gazebo 仿真演示
四足机器人纯位置控制gazebo仿真,验证学习过程中仿真控制、运动学、FSM和步态相关
【A*路径规划】机器人|Gazebo|TurtleBot3|ROS2|
ROS仿真无人车路径规划
当你电赛用了ROS…
机器人操作系统 ROS 快速入门教程
四轮小车导航规划,快速全局路径规划和局部路径规划,可以实现倒车规划,动态避障
Gazebo仿真环境搭建
【ROS路径规划快速入门】ROS1 A星+PID 运行平台
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
【鱼香ROS】动手学ROS2|ROS2基础入门到实践教程|小鱼带你手把手学习ROS2
为何不看好 机器人ROS开发
激光雷达视觉融合完成了,这次效果好了,重合了,嘎嘎香。
ROS路径规划与仿真导航
XJU移动机器人仿真-第1期 环境搭建(gazebo模型 插件 urdf rviz)
70分钟快速入门Gazebo机器人仿真
ROS小车 SLAM+导航+全覆盖路径规划
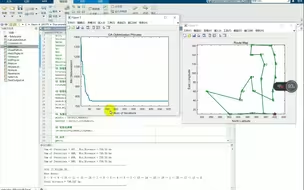
路径规划matlab全集
学妹做的ros小车,浅浅的建个图吧
ROS导航系统 | DWA规划器 | DWA Planner
基于ROS2的自动驾驶决策规划系统--深度强化学习决策--Lattice规划--MPC控制
【四足机械臂机器人】硕士学位论文仿真与实验验证视频
【ROS】非常好gmapping,使我的map旋转