V
主页
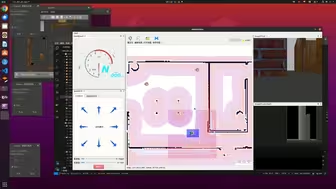
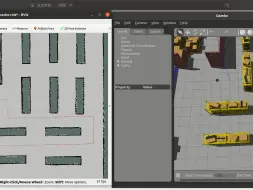
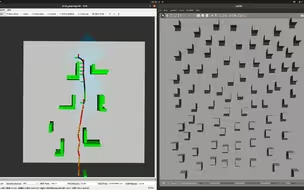
【ROS】使用Gmapping算法建图与A*路径规划算法导航的智能小车,GUI界面显示
发布人
使用Gmapping算法对仿真场景进行激光SLAM,建图完成后,建立一个GUI界面并使用A*路径规划算法对小车进行导航 私信或关注微信公众号“开发者工坊”回复“建图与导航”获取源码
打开封面
下载高清视频
观看高清视频
视频下载器
[开源] 基于Qt的ROS1/ROS2人机交互软件-V0.3.4版本,编译及使用说明,更新机器人车身轮廓显示,机器人相机图像显示
gazebo仿真ros小车路径规划与避障
ROS如何用激光雷达建图
机器人导航算法应该怎么学(1)
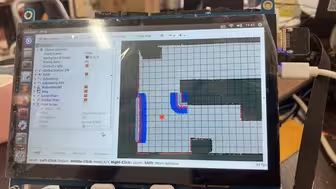
基于ROS的机器人建图与导航仿真全过程
在Gazebo仿真环境下基于ROS的自动驾驶小车
如何使用Gmapping进行SLAM建图
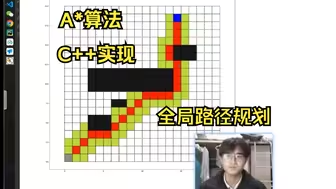
A星算法C++实现及详解,自动驾驶全局路径规划astar算法
自主移动机器人-建图-定位-导航
ROS路径规划与仿真导航
【ROS、PX4】基于虚拟领航员、人工势场法队形组织的无人机编队飞行仿真
【新手视频教程】+SLAM建图+自主导航+语音交互+(miiboo机器人出品)
基于ROS的全覆盖路径规划算法
四轮小车导航规划,快速全局路径规划和局部路径规划,可以实现倒车规划,动态避障
ROS中自定义全局规划器(上)_算法部署
ROS小车实现激光雷达gmapping建图并保存地图
ros 路径规划 全局采用固定路径,局部采用纯跟随算法(RPP)
学到了这些,证明你已经掌握了ROS的基本技能
5、Gmapping建图
Gazobo仿真环境下的自动驾驶小车
ROS 路径规划中,绘制固定路经
ROS路径规划Gazebo仿真Rviz导航机器人实现
ROS机器人未知环境自主探索大地图测试效果演示
Ros实现全覆盖路径,毕设实现小一半咯
什么是里程计
【路径规划Gazebo仿真】自适应DWA与传统DWA路径规划效果对比
复杂环境下的实时路径规划
ROS小车 SLAM+导航+全覆盖路径规划
路径规划算法大全,我会把市面上有的算法都收集放在群里面。关注我,才有动力更新,要资料看up主页
机器人路径规划、轨迹优化课程-第十五讲-ROS简介与软约束代码讲解
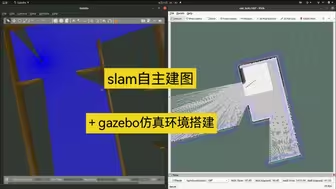
gazebo仿真+slam建图
XJU移动机器人仿真-第1期 环境搭建(gazebo模型 插件 urdf rviz)
ROS入门必学导航算法-Navigation
【ROS路径规划快速入门】ROS1 A星+PID 运行平台
路径规划matlab全集
70分钟快速入门Gazebo机器人仿真
ROS导航系统 | DWA规划器 | DWA Planner
什么是SLAM
Gazebo仿真环境下的小车使用ROS实现识别及导航
开源!基于RRT的路径规划(ROS C++/Python/Matlab仿真)