V
主页
京东 11.11 红包
加个预告,稚晖君小电子,也挺好玩,这个小机器人还有可挖掘的部分,加语音和大模型,一定要去做,不能拖了
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
液态金属机器人——黛西公主 #二次元 #黛西公主 #液态机器人
稚晖君Dummy复刻换上钢板,机械臂终于有了她该有的样子,前前后后一顿折腾,有了更多扩展的可能
简单的复位,机器人复位,就这么简单
机器人组装第一阶段效果,后续还是得详细讲解下具体技术细节
[自制] 工创是大学最后一场比赛了,加油!
机器人复刻,组装,电机调试,别炸了,不然不好交代,齐步走
公主被改造成为液体机器人#改造#机械飞升
再传几个机械臂命令复杂的控制方式,MOVEJ命令示范,后续真的没库存了
科技与狠活10:避坑,最强ARM板卡,SDRAM技术验证,读写数据无出错,设计SDRAM的心愿已了
基于磁编码器校准,可以自己校准了,有点意思了,后续还是要详细代码讲,预告一下
科技与狠活系列9:自制ARM最强板卡STM32 H743IIT6,集高级功能于一体,让SDRAM实现32M内存扩展,效果很棒
Dummy关节调试,关节组装,后续补充详细硬件复刻
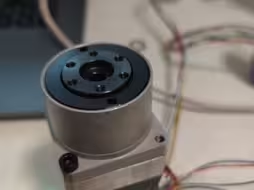
谐波减速机,可以动了,稚晖君机械臂复刻第一步
钢网,小焊台,听锡融化的声音,42电机驱动FOC控制板
瑞芯微最强MPU RK3588跑安卓也是松松的,跑UBUNTU也不错,就它了吧,做点东西出来
稚晖君机器人组装,调试,测试,慢慢慢慢怼起来,快了吧
机器人驱动钢网焊接,没有两把刷子,首次使用加热台,尝试下,就尝试下,费点事而已
科技与狠活4: Dummy核心板,驱动板手搓后,系统调试问题说明,避坑指南,最新硬件优化
电路原理图
巴斯光年机器人来啦!会说笑话会说脱口秀,还会叫你去睡觉哈哈
FOC磁定向矢量控制到底什么波形,实测呈现,后续需要进一步把硬件优化下,对无刷电机得控制,还是有点兴趣
自制立体沙威玛传奇教程来啦!有手就会做呀!让我们说中文!
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
科技与狠活16:MOS全桥逆变电路测试波形正常,符合技术预期,技术版图即将收敛,下一步三相SVPWM算法即将开启
DUMMY复刻调试,这种问题,着实难。好在有好的结果
第1讲:DUMMY系统芯片选型之FLASH持久存储以及调试与控制问题分析
科技与狠活5:Dummy真小白组装避坑说明,电机径向磁铁,减速器,相位接线,问题一个不能少,小白必踩坑
户外实用工具
瑞芯微最强MPU RK3588, 效果还是刚刚的,做视觉够不够?8核,NPU 万亿算力
科技与狠活1:有点坑,还是说明一下,dummy复刻没那么简单,42电机驱动说明下潜在问题
科技与狠活18:三相MOS FOC矢量控制算法,实现旋钮开关的实验效果展示,没想到PID参数非常重要,成了成功失败的关键之关键。记录下
(8)小白点焊机入门,电容怎么充放电?
就是调试一个磁定向控制,不符合预期,后续会重新优化软硬件,做个预告。后续开源
stm32+uno 大二毕设机械手 你想要一只真正的机械手吗?少年 肌电信号检测 舵机驱动
机械臂动起来了,有点效果,不是想要的,后面自动轨迹跟踪才是,反正动起来了
第5讲:如何基于串口进行Dummy机械臂调试(关键)
[开源]如何读懂一张电路图并制作出一个反激开关电源_反激变压器设计不再难
科技与狠活23:FOC全国产MOS并联实现3相全桥逆变电路实验效果,无刷电机控制驱动板初步验证OK,不过V相存在尖峰,正在优化中
科技与狠活24: 书接上回,FOC矢量控制完美的波形已经产生,三相MOS驱动逆变控制测试接近预期,尖峰问题已经定位解决,记录下
科技与狠活22: 切入电流环,Clark 变换,Park变换,低通滤波器,深入讲解下FOC学习的笔记,做一次专业技术总结,可能比较难以理解,但是的确很重要