V
主页
科技与狠活10:避坑,最强ARM板卡,SDRAM技术验证,读写数据无出错,设计SDRAM的心愿已了
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
科技与狠活系列9:自制ARM最强板卡STM32 H743IIT6,集高级功能于一体,让SDRAM实现32M内存扩展,效果很棒
科技与狠活16:MOS全桥逆变电路测试波形正常,符合技术预期,技术版图即将收敛,下一步三相SVPWM算法即将开启
科技与狠活15:基于英飞凌MOS管实现全桥逆变,懂得人都懂,明天测试正常后,准备再加一相,通过电流采样电路,最终实现SVPWM算法像素级矢量控制
科技与狠活22: 切入电流环,Clark 变换,Park变换,低通滤波器,深入讲解下FOC学习的笔记,做一次专业技术总结,可能比较难以理解,但是的确很重要
科技与狠活5:Dummy真小白组装避坑说明,电机径向磁铁,减速器,相位接线,问题一个不能少,小白必踩坑
科技与狠活14:加完钢板,Dummy运动效果还行,实锤稚晖君DH参数是没问题的,时间允许给大家讲讲DH参数,真核心
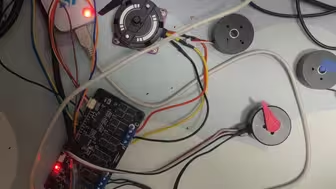
科技与狠活18:三相MOS FOC矢量控制算法,实现旋钮开关的实验效果展示,没想到PID参数非常重要,成了成功失败的关键之关键。记录下
科技与狠活17:基于Odrive解决方案,进行FOC磁场定向控制算法测试,理论与效果差异很大,不过为后续机器人力反馈夹爪提供一些支撑,但还有一些问题需要搞明白。
科技与狠活21:FOC控制算法实现两个旋钮同步孪生控制效果,跟随运动效果,基于电流环实现,记录下调优经验
科技与狠活4: Dummy核心板,驱动板手搓后,系统调试问题说明,避坑指南,最新硬件优化
科技与狠活19:忍不住快速讲讲三相MOS FOC磁场定向控制算法疑难点,讲着都难,还是分享下我推公式的总结吧,实在没法从头说,有问题评论区见吧
科技与狠活12: H7 LVGL屏幕IIC触摸功能验证完毕,整个STM32全系列玩了一遍了,下一阶段准备做支持linux内核的板子了
稚晖君Dummy复刻换上钢板,机械臂终于有了她该有的样子,前前后后一顿折腾,有了更多扩展的可能
第6讲:DUMMY驱动控制器F103CBT6时钟树以及定时器配置剖析
科技与狠活7:Dummy核心硬件终于可以自我迭代进化了,着实不易,算是里程碑吧,记录下
瑞芯微最强MPU RK3588跑安卓也是松松的,跑UBUNTU也不错,就它了吧,做点东西出来
科技与狠活6:告诉你如何基于串口控制机械臂位姿,具体操作效果呈现
科技与狠活3: 手工活,带你走进详细的手搓贴片,虽然曲折,好歹dummy机械臂驱动,控制均正常
科技与狠活20:机械手矢量控制算法FOC之PID速度环惯性模式演示,之后关于FOC实验先告一段落了,回顾职场过往经历,聊聊未来计划,开始下一阶段挑战
基于磁编码器校准,可以自己校准了,有点意思了,后续还是要详细代码讲,预告一下
BGM过大,重新优化,科技与狠活,稚晖君DUMMY核心硬件手动焊接,调试,问题定位,解决,给你一个详细的硬件调试指南 。硬件告一段落,开启下一段冒险
商业级嵌入式系统设计之 SDRAM时序及原理深入剖析(二)
机器人组装第一阶段效果,后续还是得详细讲解下具体技术细节
商业级嵌入式系统设计之SDRAM时序及原理深入剖析(一)
FOC磁定向矢量控制到底什么波形,实测呈现,后续需要进一步把硬件优化下,对无刷电机得控制,还是有点兴趣
就是调试一个磁定向控制,不符合预期,后续会重新优化软硬件,做个预告。后续开源
DUMMY复刻调试,这种问题,着实难。好在有好的结果
商业级嵌入式系统设计之主流芯片选型指南
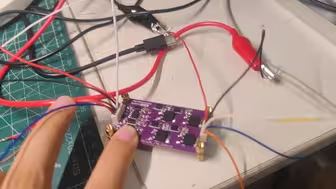
钢网,小焊台,听锡融化的声音,42电机驱动FOC控制板
第1讲:DUMMY系统芯片选型之FLASH持久存储以及调试与控制问题分析
商业级嵌入式系统设计之H7芯片整体架构概述
Dummy 复刻,有点难,效果太少,还是多来点,至少有点样子了
6000档最强?机械革命极光X拆机简评
项目启动了,能完成么,不确定吧,走着走着有些着就有路了吧
再传几个机械臂命令复杂的控制方式,MOVEJ命令示范,后续真的没库存了
3年前,STM32 H7B0手搓焊接,双SPI ROM扩展,调试LVGL, 做出这种效果,还行吧,要开源
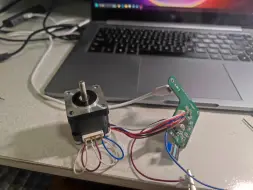
先逐步把关节电机搞定,机器人组装第一步,稚晖君机械臂复刻还有漫长的路要走
机器人驱动钢网焊接,没有两把刷子,首次使用加热台,尝试下,就尝试下,费点事而已
你最想在纯血鸿蒙用上哪款软件?霸榜心愿榜单,第一名果然还是它
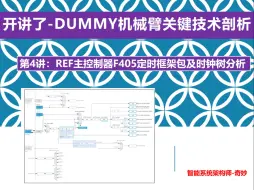
第4讲:Dummy REF主控制器F405定时器框架及时钟树分析