V
主页
京东 11.11 红包
【simulink机器人仿真】机器人轨迹规划——梯形速度规划
发布人
【simulink机器人仿真】机器人轨迹规划——梯形速度规划
打开封面
下载高清视频
观看高清视频
视频下载器
【simulink机器人仿真】机器人阻抗控制——定点阻抗、轨迹跟踪阻抗
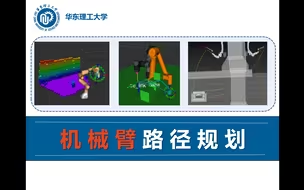
《路径规划入门教程》——第一个专注于机械臂的路径规划课程
【机械臂入门教程】机械臂视觉抓取从理论到实战
ROS机械臂实现自定义路径规划算法——用自己的算法,简直不要太爽~
终于来了,机器人学习路线经验分享!华理学长毫无保留分享~
【自制协作机器人】华理研二科研成果展示
机械臂入门|手眼标定|科研小白分享日常生活
【simulink机器人仿真】机器人笛卡尔空间阻抗控制
华理研一|记录科研生活|机械臂倒水demo展示
【simulink机器人仿真】协作机器人动力学重力补偿演示
基于ROS-MoveIt完成机械臂六自由度抓取demo
UR5机器人MATLAB动力学建模demo | 逆动力学验证
【ROS机械臂入门教程】第2讲-从机械臂视角看ROS
【simulink机器人仿真】协作机器人逆运动学8组解可视化
机械臂拧螺丝演示——阿特拉斯科普柯机器人大赛获奖记录
【ROS机械臂入门教程】第6讲-Moveit基础(python)
【人形机器人仿真】基于强化学习的双足机器人行走
【ROS机械臂入门教程】第1讲-概述
机械臂笛卡尔空间位姿插补
【ROS机械臂入门教程】第11讲-基于ROS-Moveit实现6-DOF视觉抓取
华理研一科研分享|机械臂视觉抓取|六自由度抓取姿态预测
【人形机器人仿真】MPC实现原地踏步走,每天进步一点点~
【人形机器人仿真】基于纯MPC的双足机器人行走演示
【自制协作机器人】拖动示教不是简简单单?
【2024秋招】中国机器人企业名单,供参考
【ROS机械臂入门教程】第4讲-Moveit!核心功能介绍及Rviz控制
【ROS机械臂入门教程】第3讲-机器人URDF建模
【ROS机械臂入门教程】第5讲-Gazebo仿真or控制真实机器人
基于OMPL的路径规划算法基准测试,快来看看哪个算法最强吧!
四足爬行机器人webots仿真-综合场景测试
【ROS机械臂入门教程】第8讲-运动规划-如何选择Moveit中的规划算法?
【ROS机械臂入门教程】第7讲-Moveit基础(C++) 实现带约束的路径规划
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
【Maplesim仿真】介绍一款小众但好用的机器人运动控制仿真软件
一镜到底|GPT4o在机器人领域的应用探索
分体式服务机器人!
KUKA iiwa7机器人基本控制与阻抗控制演示,再也不用在实验室积灰了
【人形机器人仿真】表演一下迈克尔杰克逊舞步
华理研一科研分享|成功率接近100%的6自由度抓取|
一个基于CUDA的真实丛林环境的仿真