V
主页
京东 11.11 红包
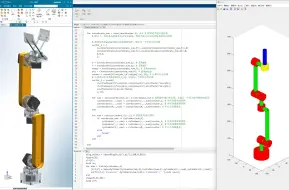
UR5机器人MATLAB动力学建模demo | 逆动力学验证
发布人
.
打开封面
下载高清视频
观看高清视频
视频下载器
ur5、ur16e机械臂(优傲机器人)的运动学正逆解(c++解析解)+直线插值moveL+碰撞检测+动画仿真展示
UR5关节拆解和装配教程
【机械臂建模仿真】六轴机械臂MATLAB数学建模_直播回放
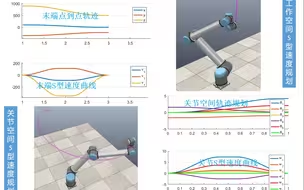
UR机器人S型轨迹规划matlab、vrep联合仿真
【组会论文汇报】UR5机械臂剥香蕉(演示视频在25分30秒)
【simulink机器人仿真】协作机器人逆运动学8组解可视化
六自由度机械臂正逆解UR5机械臂仿真和代码
UR机械臂运动学C++源码
【附源码】在 ROS Gazebo 模拟中使用 UR5 机器人进行力控制装配
华理研一|记录科研生活|机械臂倒水demo展示
UR5机械臂视觉抓取gazebo仿真
【史上最强机械臂教程】机械臂运动学、轨迹规划和动力学控制仿真
机械臂入门|手眼标定|科研小白分享日常生活
UR5机械臂平面抓取物体
机器人DH法、运动学、雅克比(Jacobian)矩阵
【机器人动力学】罗马大学2020 中英字幕 持续更新ing
UR5机械臂运动学的Python实现+PyBullet机械臂仿真
matlab动力学建模与simscape验证
一起用Matlab从零手写六轴机械臂正逆解和轨迹规划
用Solidworks对机械臂进行建模并用simscape插件将模型导入到MATLAB中进行仿真
【Matlab机器人工具箱】- 运动学①---建立机器人模型--1、Link类 2、SerialLink类
【自制协作机器人】华理研二科研成果展示
机器人动力学拉格朗日法详细推导(二连杆机械臂)
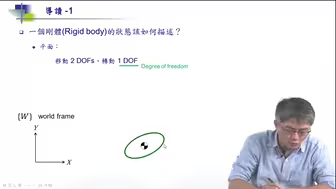
台大机器人学之动力学——林沛群
KUKA iiwa7机器人基本控制与阻抗控制演示,再也不用在实验室积灰了
【ROS机械臂入门教程】第3讲-机器人URDF建模
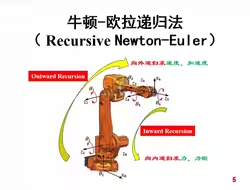
机械臂动力学建模的牛顿欧拉递归法
四足爬行机器人webots仿真-综合场景测试
基于MALTAB/Simulink、Coppeliasim的六轴机械臂仿真
【simulink机器人仿真】机器人轨迹规划——梯形速度规划
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
华理研一科研分享|机械臂视觉抓取|六自由度抓取姿态预测
【ROS机械臂入门教程】第5讲-Gazebo仿真or控制真实机器人
丹麦优傲工业机器人基本操作教学
机器人动力学建模的拉格朗日方程
【ROS机械臂入门教程】第2讲-从机械臂视角看ROS
关于VREP/CoppeliaSim 中精确建立DH模型问题的解决方案 - ur5机器人视频教程
UR5e抓取测试
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
【simulink机器人仿真】协作机器人动力学重力补偿演示