V
主页
ROS机械臂实现自定义路径规划算法——用自己的算法,简直不要太爽~
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
使用OpenCV+Python+树莓派+机械臂实现一个草莓分拣机器人,代码https://github.com/ShiqiYu/StrawberryRobot
【机械臂入门教程】机械臂视觉抓取从理论到实战
7.Moveit!机械臂控制
终于来了,机器人学习路线经验分享!华理学长毫无保留分享~
基于OMPL的运动规划介绍与教程|ROS|开源代码
【Matlab】路径规划——机器人避障
【搬】机械臂动态环境实时路径规划2009
ROS中自定义全局规划器(上)_算法部署
【路径规划】六自由度机械臂无碰撞逆解+路径规划避障
ROS机械臂控制RVIZ仿真建模Moveit!路径规划虚拟与现实同步控制
【开源课程】5分钟搞定机械臂开发和仿真环境,MoveIt!
华理研一科研分享|机械臂视觉抓取|六自由度抓取姿态预测
【开源项目】【深度教学】手把手带你实现视觉引导机械臂抓取(STM32+OPENMV方案)
yolo+PointCloud+MoveIt+ROS机械臂自主避障抓取
【ROS机械臂入门教程】第2讲-从机械臂视角看ROS
【2024秋招】中国机器人企业名单,供参考
基于OMPL的路径规划算法基准测试,快来看看哪个算法最强吧!
基于ROS-MoveIt完成机械臂六自由度抓取demo
【古月居】ROS机械臂开发:从入门到实战
《路径规划入门教程》——第一个专注于机械臂的路径规划课程
基于机器视觉的自主路径规划多臂番茄采摘机器人
【ROS机械臂入门教程】第9讲-视觉避障
【自制协作机器人】华理研二科研成果展示
适用所有机械臂!轨迹跟踪仿真!matlab算法!手把手教程|源码公开
8. 机械臂轨迹规划实例
【ROS机械臂入门教程】第8讲-运动规划-如何选择Moveit中的规划算法?
基于ROS的六轴机械臂控制
【ROS机械臂入门教程】第7讲-Moveit基础(C++) 实现带约束的路径规划
惊现EI论文源代码-移动机器人和机械臂路径规划仿真实验代码
【ROS机械臂入门教程】第3讲-机器人URDF建模
【ROS机械臂入门教程】第1讲-概述
【Matlab】轨迹规划——避障
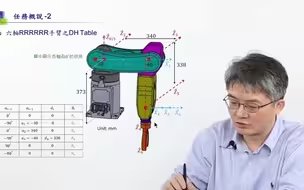
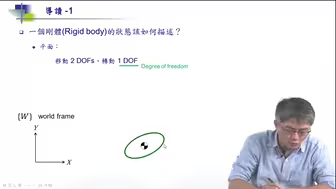
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
基于ROS2的协机械臂手眼标定与视觉分拣—ROS暑期学校精彩回放
【ROS机械臂入门教程】第6讲-Moveit基础(python)
【ROS机械臂入门教程】第5讲-Gazebo仿真or控制真实机器人
ROS机械臂教程《如何基于MoveIt开发一款机械臂》
【ROS机械臂入门教程】第11讲-基于ROS-Moveit实现6-DOF视觉抓取
【古月居】ROS机械臂开发原理
【ROS机械臂入门教程】第4讲-Moveit!核心功能介绍及Rviz控制