V
主页
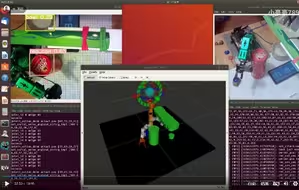
【ROS机械臂入门教程】第4讲-Moveit!核心功能介绍及Rviz控制
发布人
三连+关注后私信up,回复“002”,我会把项目代码发给你
打开封面
下载高清视频
观看高清视频
视频下载器
【机械臂入门教程】机械臂视觉抓取从理论到实战
7.Moveit!机械臂控制
【古月居】ROS机械臂开发:从入门到实战
【简易机械臂教程】定点坐标控制-逆运动学解、上位机、电路设计、编程实现、下位机、系统思维、资料开源……(完结)
【鱼香ROS】动手学ROS2|ROS2基础入门到实践教程|小鱼带你手把手学习ROS2
【moveit开源+超简单】双臂机器人抓取物块实验
【ROS机械臂入门教程】第6讲-Moveit基础(python)
【公开课】古月精讲 · ROS移动机器人实战 | ROS入门必看!
【古月居】古月·ROS2入门21讲 | 带你认识一个全新的机器人操作系统
【赵虚左】《ROS理论与实践》第8、9章--ROS机器人操作系统
ROS Moveit桌面机械臂进阶视频教程(二)|Moveit_Setup_Assistant配置讲解
【ROS机械臂入门教程】第3讲-机器人URDF建模
【古月居】ROS机械臂开发原理
机器人操作系统 ROS 快速入门教程
【ROS机械臂入门教程】第11讲-基于ROS-Moveit实现6-DOF视觉抓取
70分钟快速入门Gazebo机器人仿真
《路径规划入门教程》——第一个专注于机械臂的路径规划课程
【开源课程】10分钟掌握机械臂3D坐标变换体系~超简单讲解!MoveIt!
ROS机械臂教程《如何基于MoveIt开发一款机械臂》
【ROS机械臂入门教程】第7讲-Moveit基础(C++) 实现带约束的路径规划
【ROS机械臂入门教程】第9讲-视觉避障
solidworks转URDF,并且在rviz中仿真
【开源课程】5分钟搞定机械臂开发和仿真环境,MoveIt!
yolo+PointCloud+MoveIt+ROS机械臂自主避障抓取
【ROS机械臂入门教程】第2讲-从机械臂视角看ROS
【ROS机械臂入门教程】第8讲-运动规划-如何选择Moveit中的规划算法?
【开源项目】【深度教学】手把手带你实现视觉引导机械臂抓取(STM32+OPENMV方案)
《 MoveIt运动控制来了! 在抓取仿真平台上代码驱动UR抓取绝不止于想象!》
【轮趣科技】ROS机械臂教程
【ROS机械臂入门教程】第1讲-概述
【古月居】ROS机器人开发实践
【ROS机械臂入门教程】第5讲-Gazebo仿真or控制真实机器人
ROS机械臂实现自定义路径规划算法——用自己的算法,简直不要太爽~
ROS Moveit机械臂仿真
基于OMPL的路径规划算法基准测试,快来看看哪个算法最强吧!
【2024秋招】中国机器人企业名单,供参考
基于Moveit与yolov5的gazebo仿真(开源填坑)
2022 ROS 暑期学校
UR5机器人MATLAB动力学建模demo | 逆动力学验证
7ROS理论与实践_.Moveit!机械臂控制_视频