V
主页
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
发布人
https://www.youtube.com/watch?v=EaUzGOmvvlM Convergent iLQR for Safe Trajectory Planning and Control of Legged Robots James Zhu, J. Joe Payne, Aaron M. Johnson In order to perform highly dynamic and agile maneuvers, legged robots typically spend time in underactuated domains (e.g. with feet off the ground) where the system has limited command of its acceleration and a constrained amount of time before transitioning to a new domain (e.g. foot touchdown). Meanwhile, these transitions can instantaneously change the system's state, possibly causing perturbations to be mapped arbitrarily far away from the target trajectory. These properties make it difficult for local feedback controllers to effectively recover from disturbances as the system evolves through underactuated domains and hybrid impact events. To address this, we utilize the fundamental solution matrix that characterizes the evolution of perturbations through a hybrid trajectory and its 2-norm, which represents the worst-case growth of perturbations. In this paper, the worst-case perturbation analysis is used to explicitly reason about the tracking performance of a hybrid trajectory and is incorporated in an iLQR framework to optimize a trajectory while taking into account the closed-loop convergence of the trajectory under an LQR tracking controller. The generated convergent trajectories recover more effectively from perturbations, are more robust to large disturbances, and use less feedback control effort than trajectories generated with traditional methods. https://arxiv.org/abs/2304.00346
打开封面
下载高清视频
观看高清视频
视频下载器
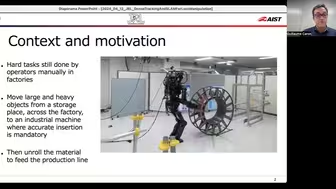
有开源github代码! RA-L论文 人形机器人的多接触全身控制
人形机器人足底机械结构设计
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
强烈推荐!一套课程解决人工智能入门三步走:机器学习、深度学习、强化学习,真正适合小白自学的神级教程!
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
(RA-L 23) Reactive Landing Controller for Quadruped Robots
SLoMo: A General System for Legged Robot Motion Imitation from Casual Videos
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
How to design nonlinear MPC with deep learning prediction model
(Talk ICRA 2024) Actor-Critic Model Predictive Control
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
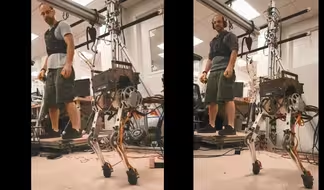
Model and data, two essential ingredients for controlling legged robot
Part 2 - How to Solve Inverse Kinematics of a 4 Leg Robot
基于分层优化的四足机器人全身运动控制搬运重物
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
强推!上海交大、腾讯、中国科学院三方强强联合的【python+机器学习+深度学习】系列课程,堪称人工智能系列课程的巅峰之作!-人工智能/深度学习/机器学习
(ICRA 2024) Actor-Critic Model Predictive Control
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
Real-Time Constraint-Based Planning and Control of Robotic Manipulators
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
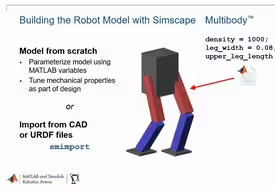
双足机器人的建模与仿真 MATLAB and Simulink
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
(ICRA 2024)Contrastive Initial State Buffer for Reinforcement Learning
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
CasADi 3.6 tutorial (C++ Matlab Python)
Towards embodied intelligence -Nicolas Heess (DeepMind)
[RSS 24] Rethinking Robustness Assessment 重新思考鲁棒性评估
强推!上海交大、腾讯、中国科学院三方强强联合的【python+机器学习+深度学习】系列课程,堪称人工智能系列课程的巅峰之作!-人工智能/深度学习/机器学习
Tuning Legged Locomotion Controllers via Safe Bayesian Optimization
Bipedal Safe Navigation over Uncertain Rough Terrain
人形机器人 手指机械结构
A Distributed Processing Approach for Smooth Task Transitioning in SHC
Reinforcement learning for blind stair climbing with legged and wheeled robot