V
主页
Safety-Critical Control of Autonomous Systems -Aaron Ames
发布人
Institute for Pure and Applied Mathematics, UCLA October 26, 2020 https://www.youtube.com/watch?v=ZC3T_P_8xpE&t=1927s Mathematical Challenges and Opportunities for Autonomous Vehicles 2020 Workshop II: Safe Operation of Connected and Autonomous Vehicle Fleets "Safety-Critical Control of Autonomous Systems" Aaron Ames - California Institute of Technology Abstract: Guaranteeing safe behavior is a critical component of translating autonomous systems from a laboratory setting to real-world environments. With this as motivation, this talk will present a safety-critical approach to the control of nonlinear systems. To this end, a unified nonlinear control framework for realizing dynamic behaviors will be presented. Underlying this approach is an optimization-based control paradigm leveraging control barrier functions that guarantee safety (represented as forward set invariance). The impact of this paradigm will be considered in the context of autonomous systems, and the application of these ideas will be demonstrated experimentally on a wide variety of robotic systems. Finally, the realization of safety-critical control in the context of automotive systems will be considered with a view toward autonomous vehicle fleets. Institute for Pure and Applied Mathematics, UCLA October 26, 2020 For more information: https://www.ipam.ucla.edu/avws2
打开封面
下载高清视频
观看高清视频
视频下载器
写了一个人形机器人仿真,适用5或者6自由度的腿形
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
Deep Compliant Control for Legged Robots
人形机器人足底机械结构设计
How to design nonlinear MPC with deep learning prediction model
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
Real-Time Constraint-Based Planning and Control of Robotic Manipulators
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
The MIT Humanoid Robot Design Motion Planning and Control ForAcrobatic Behaviors
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
Model and data, two essential ingredients for controlling legged robot
MIT Robotics - Jessy Grizzle - Mathematics and Learning for Bipedal Locomotion
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
DeepMind x UCL RL Lecture Series-Theoretical Fund of Dynamic Programming Algo 4
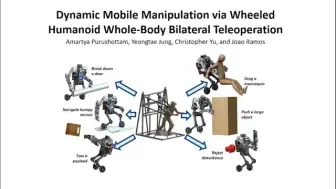
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
Online trajectory optimization for dynamic aerial motions of a quadruped robot
overcoming the practical challenges when using reinforcement learning
马斯克确认Tesla Optimus Gen 2的生产价格为1万美元!
真牛!这个人形机器人吊打很多厂家的“产品”
A Distributed Processing Approach for Smooth Task Transitioning in SHC
(ICRA 2024) Actor-Critic Model Predictive Control
DeepMind x UCL RL Lecture Series - Exploration & Control 2
Learning legged locomotion, RL as one tool in an engineered system
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
Versatile Skill Control via Self-supervised Adversarial Imitation
MIT Robotics - Marco Hutter - Robots in the wild
DTC: Deep Tracking Control 1
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
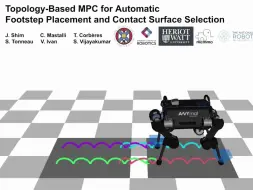
Topology-Based MPC for Automatic Footstep Placement and Contact Surface Selectio
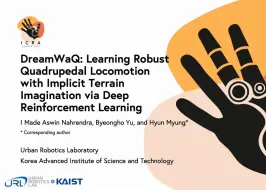
DreamWaQ: legged robot walks in harsh environments with its imagination P1
A Feasibility-Driven Approach to Control-Limited DDP
Perturbation-Resilient Bipedal Locomotion via Signal Temporal Logic Guided Model
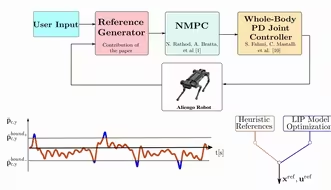
Optimization-Based Reference Generator for Nonlinear Model Predictive Control
Vision-Based Terrain-Aware Locomotion for Legged Robots ---T-RO
(Talk ICRA 2024) Actor-Critic Model Predictive Control
reinforcement learning policies and learning algorithms
ORORA: Outlier Robust Radar Odometry
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能