V
主页
京东 11.11 红包
机器人从人类活动和模拟交互的视频中学习|2023【metaAI】
发布人
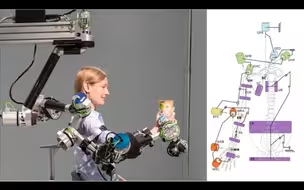
metaAI:机器人从人类活动和模拟交互的视频中学习 更具体地说,具身人工智能需要捕捉与环境交互的数据。 传统方法,这种交互数据是通过收集大量演示或让机器人从头开始从交互中学习来收集的。 这两种方法都过于耗费资源,无法扩展到一般的具身AI智能体。 MetaAI 开发了机器人学习的新方法,机器人能够从人类与现实世界互动的视频以及逼真模拟世界中的模拟互动中学习。 metaAI新闻:https://ai.facebook.com/blog/robots-learning-video-simulation-artificial-visual-cortex-vc-1/ artificial visual cortex论文:Majumdar, Arjun, Karmesh Yadav, Sergio Arnaud, Yecheng Jason Ma, Claire Chen, Sneha Silwal, Aryan Jain et al. "Where are we in the search for an Artificial Visual Cortex for Embodied Intelligence?." arXiv preprint arXiv:2303.18240 (2023). 代码:https://github.com/facebookresearch/eai-vc/ 主页:https://eai-vc.github.io/
打开封面
下载高清视频
观看高清视频
视频下载器
开源图像分割Segment Anything Model|2023【MetaAI】
拥有真实人类肌肉的人形机器人,走路最帅SE01众擎机器人,量产XBOT咖啡机器人:未来的智能咖啡师
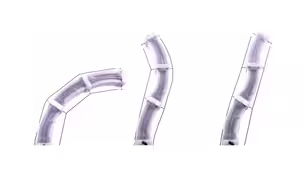
BIOIC线驱软连续机器人|2022【德国弗劳恩霍夫研究所】
SEER:模拟情绪表达机器人|2018【東京大学】
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
无限逼近人类身体构造,人工肌肉驱动的类人机器人Torso登场
看哈工大学生做出的黑科技 | 格斗机器人拿下国际大奖
准备爬行「3D打印爬行机器人」|2016【東京大学】
单个舵机驱动的简易仿生手
Ascender:世界上第一个爬楼梯的机器人吸尘器|2023【migorobotics】
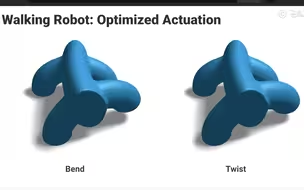
自动布肌肉纤维「软体机器人」|2020【迪士尼Disney】
机器人大语言模型综合技能学习:从语言到奖励|2023【Google】
智能多臂苹果采摘机器人|2024【Tevel&advanced.farm】
XBG:ergoCub人形机器人自主交互行为的端到端模仿学习|2024【IIT】
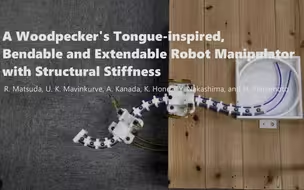
啄木鸟启发的机械手|2022【日本九州大学】
FluidLab:复杂流体操作|2023【卡耐基梅隆大学】
ElectroVoxel:模块化自重构机器人|2022【MIT】
农业机器人将养活世界|2023【Freethink】
OPT-Mimic:模拟动态四足动物行为的优化轨迹|ICRA 2023【不列颠哥伦比亚大学】
用于现实世界行走的个性化外骨骼|2021|哈佛大学【Science Robotics】
机器人空间感知基础:实时层级编码系统|2023【MIT】
折纸机器人Microfliers:通过形状变化控制飞行|2023【Science Robotics】
𝐄𝐱𝐩𝐫𝐞𝐬𝐬𝐢𝐯𝐞 𝐇𝐮𝐦𝐚𝐧𝐨𝐢𝐝: 人形机器人模仿人类逼真动作|2024 RSS【UC San Diego】
泡泡造软体机器人|2021【Nature】
MetaUrban:城市环境中的具身人工智能模拟平台|2024【加州大学洛杉矶分校】
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
亚马逊推出农业机器人Hippo Harvest|首个绿叶蔬菜生产线-用水量减少 92%|2023【亚马逊Amazon】
SNAP:自监督神经地图|2023 NeurIPS【Google】
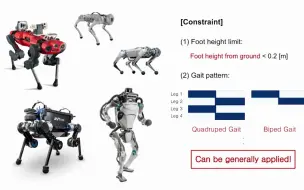
腿式机器人运动:不仅有奖励,还有约束|2023【韩国KAIST】
再来一段特斯拉机器人的视频,这次人味更重了
特斯拉人形机器人工厂上班的一天🤖
机器人学习敏捷足球技能|2023【Deepmind】
Co-SLAM:神经实时 SLAM 的联合坐标和稀疏参数编码|cvpr 2023【UCL】
ANYexo 2.0:完全驱动的上肢外骨骼|TRO 2023【苏黎世联邦理工学院】
全自动番茄剪枝机器人Kompano|2021【荷兰Priva】
谨以此短视频致敬稚晖君发布并开源Dummy机械臂三周年
如何用3d打印做一个机械臂
行走的机械手|2023【Netflix网飞】
机器人追-逃策略|2023【加州大学伯克利分校】