V
主页
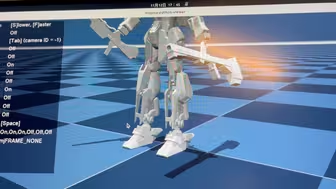
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
发布人
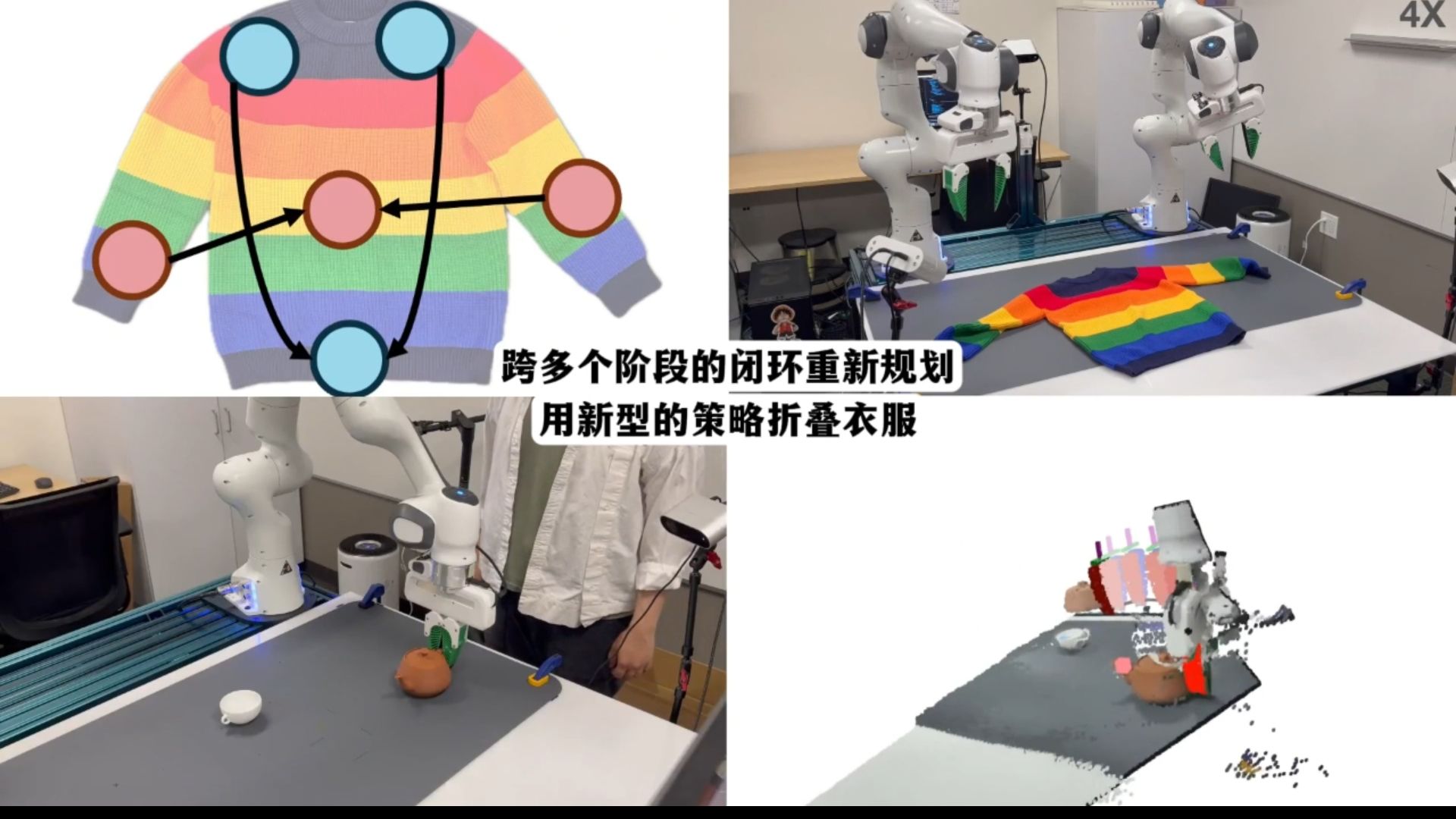
在这项工作中,该团队提出了关系关键点约束(ReKep),这是一种使用约束的结构化任务表示,它对语义关键点进行操作,以指定机器人手臂、对象(部件)和环境中其他代理之间的所需关系。结合点跟踪器,该团队证明ReKep约束可以在分层优化框架中重复高效地解决,以充当以实时频率运行的闭环策略。该团队还展示了ReKep的独特优势,因为它可以通过大型视觉模型和视觉语言模型自动合成。 标题:ReKep: Spatio-Temporal Reasoning of Relational Keypoint Constraints for Robotic Manipulation 链接:https://arxiv.org/html/2409.01652v1
打开封面
下载高清视频
观看高清视频
视频下载器
机械手爬行
浙江大学邹俊/唐威 Science子刊封面:仿生:利用仿生学设计的自适应软体一体化夹持器实现强大的无人机操作能力
波士顿动力吃饭家伙,连锅带碗被砸。云深处制造山猫机器狗。越野性能极强。#机器狗 #国产机器狗 #科技改变生活 #黑科技 #玩个很新的东西
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
人形机器人越野?! DR01野外测试
多传感器融合感知
【机器人科学III】让机器人拥有类人触觉感知,哥伦比亚大学机器人实验室最新进展
赵行团队新作 | 通过专家混合 模型提升自动驾驶运动规划器的 泛化能力,实现性能新SOTA
最酷人形,我们做到了!
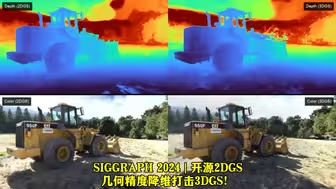
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
麻省理工-人造“肌肉”纤维,新型机器人执行器
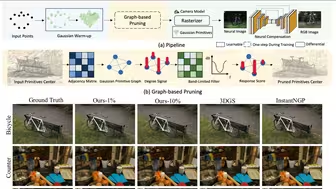
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
外网热议:如果100万只机器狼投入战场,敌人将面临怎样的恐惧?
IROS'24 普渡大学、麻省理工学院 | 5自由度触觉夹持器,性能匹敌仿生手,实现高效精确操控
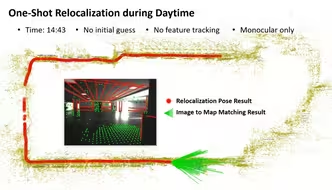
Science Robotics封面 | 当机器人学会用'快照'导航, 轻重量小内存实现'长途跋涉'
小鹏AI人形机器人Iron亮相:62个主动自由度,搭载自研AI芯片和灵巧手,已进厂打工!
智能车的最后一舞!!!它必定是绝响!!!
众擎SE01自然步态行走日常调试花絮
强化学习了个高达,emm为啥只能站着不能走
埃文凯尔被中国酒店的机器人惊艳到 “能给我送东西,感觉生活在下个世纪”
ACM SIGGRAPH Asia 2024 | RobotMDM:机器人运动扩散模型:机器人角色的运动生成
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
UCSD、MIT华人团队开源Open-TeleVision:沉浸式体验跨越3000里的机器人远程操作。
李飞飞学生联合创立,高密度科学家团队,灵初智能完成天使轮融资
NeurlPS'24 开源 | UAV3D 无人机大规模3D感知基准 数据集助力3D目标检测与跟踪
第十二期《智能无人机:从硬件到技术实战》
清华大学孙富春教授团队 综述:触觉感知在机器人灵巧操作中的应用与进展
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
【熟肉】当人工智能遇到50年代科幻片
国内外机器狗 | 都抄过它的作业 | 开源机器狗 Cheetah
赛博版画蛇添足
宇树科技人形机器人G1,高交会动态展示
70年老算法Dijkstra被证明普遍最优 斩获顶会FOCS 2024最佳论文
Nature 智能机器'24-7-封面,使用强化学习和生成预训练AI模型,举一反三,实现四足机器人逼真的敏捷性和游戏性!
【研三】自研多模态大模型架构——长时程、高鲁棒
果蝇无人机?用翅膀飞起来的无人机来了!
研一在读,导师让学自动驾驶环境感知?有这45篇经典论文就够了!
NeurlPS'24 开源 | DC-Gaussian,基于3DGS的行车记录仪视频场景重建,有效去除反射遮挡
老师现场展示自制液氮动力装置