V
主页
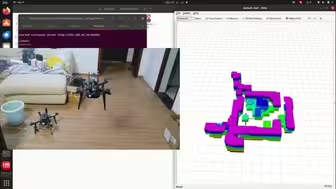
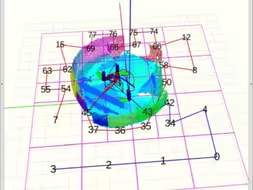
【fuel+激光雷达】刚搞完黑龙江科技大学的中期答辩,放松一下
发布人
黑科技一坨史。。。。地址:https://gitee.com/Canada-a/cxr_fuel_ws
打开封面
下载高清视频
观看高清视频
视频下载器
【FUEL自主探索】一点简要改进,让最后探索完成后回到起点
【人机交互一下】要知道黑龙江科技大学的挑战杯校赛含金量是很高的,没点实力和背景根本出不去的,评委那可是相当专业的
【自主探索无人机】在蠢比黑龙江科技大学树林里搞下FUEL(毕设期间放松下)
【整烂活】手搓一套PX4无人机的雷达自主探索代码
ego planner的二维激光雷达建图规划
【ego-planner高速飞行避障10m/s测试】速度太快了,飞机很难全程完美的贴合轨迹,所以不撞就行,作为垃圾双非菜鸡本科生对这个没有那么高要求。。。。。。
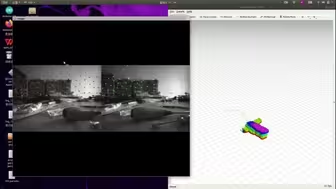
【大学出狱第一周】视觉定位无人机kcf跟踪测试
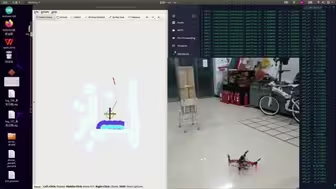
【简单玩一下】gazebo-px4-FUEL无人机自主探索飞行
ego planner室内环境仿真飞行
激光slam避障导航无人机
没有啥意义的激光雷达定点飞行(但只用雷达的原生点云没用slam的点云,需要转换下坐标系)
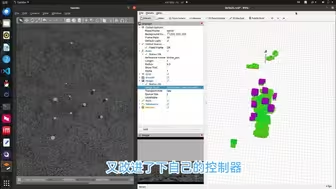
【Ego-planner 5m/s高速避障+改进了下自己的控制器】黑龙江科技大学为什么有寝室断电这种莎栾东西,大晚上的写代码跑仿真没有电很难受的,蠢比学校。。。
【瞎搞下CMU算法×FUEL】动态实时感知快速避障的自主探索小飞机
【已开源分享】FUEL无人机自主探索算法部署在实机以及PX4仿真教程
徒手抓机
一种无需建图的ros+px4导航避障无人机
CMU(卡耐基梅隆大学)最新开源无人机规划算法,和PX4结合测试极限穿窄缝
【PX4+RACER】多机自主探索测试
实机测试vins+卡内基梅隆大学的规划算法(相对位置修全局位置)
我导导导
6轴机械臂运动学正逆解验证程序,三连留邮箱
【暂时放弃的方案】RACER+倒置激光雷达自主探索无人机测试
Local_planner的px4无人机自主规划控制
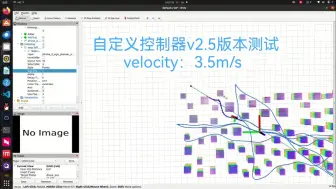
【已开源,为爱发电】egoplanner+px4的自定义控制器代码分享
控制器V2.5版本测试,3.5m/s
【手搓代码】搓一套简单的自己喜欢的无人机规划控制代码
自定义控制器跟踪egoplanner轨迹飞行,不用px4Ctrl,太危险了感觉
我国科研团队正在研发六足登月机器人
“巴布”特种机器人
egoplanner的扩大地图范围的建图
用CMU团队的规划算法在px4下做高机动避障(控制算法写的真烦,还得多向北航的车老师和全老师团队学习啊)
未来战争1,机器狗
抓邻家小孩做实验,小朋友表示很高兴!
会扭臀的机器人
【VEX世界冠军Luke说】为完美的边桩操作打造这个……./中英双语/尖峰时刻
【开源】500块钱就能做的低成本6自由度手部外骨骼_灵巧手_康复手套!
5只机器人组队进厂 担任不同零部件的搬运工 网友:5年后我将失业
电子科技大学2024新工科作品展——ROBOCON全国大学生机器人大赛冠军作品
复刻顶刊Science Robotics 折纸微型Delta并联机构(手动测试版)
今天把我做的这个机械臂开源