V
主页
向着大型行为模型发展:通过监督学习实现多功能和灵巧的机器人
发布人
摘要: 近期在机器学习领域的进步已经改变了多个与人工智能相关的领域。特别是,强大的通用语言和视觉模型正在迅速成为现实,这些新能力已经开始进入面向消费者的技术领域,影响着数以百万计人们的生活。这些相同的基础进步也预示着机器人学将发生翻天覆地的变化。现在,仅通过一两个小时的教学和几十个GPU小时的计算,就可以可靠地赋予机器人新的行为,比如打鸡蛋或折叠衣物。在这次演讲中,我将讨论我们团队在丰田研究所推动的,通过机器学习增强的机器人行为教学的扩展,以及通往机器人通用大型行为模型(Large Behavior Models)的道路。这些模型将拥有现有大型语言模型的灵活性和通用性,但将能够灵巧地控制机器人,在物理世界中产生变化。
打开封面
下载高清视频
观看高清视频
视频下载器
下一代机器人感知:3D场景图,可验证算法,自监督学习
神经场在机器人操作中的应用
机器人空间感知基础
机器人可达性研究
通用机器人路径思考:scaling law、数据飞轮和具身智能
智能机器人中的物理模型
通过学习规划和感知进行任务和运动规划
超材料类蛇直线运动机器人
Ameca机器人及一些讨论
敏捷自适应四足机器人的分层优化控制
Munich AI 讲座: 机器人运动规划
Berkeley EECS研讨会讨论:Future of Robotics
一种结构化方法来实现机器人学习泛化
新型无人机正改变游戏规则
机器人学习中运动表示
GRASP on Robotics: 通过柔性、动力学和接触特性实现灵活的机器人
行业视角看AI 机器人的发展
迈向机器人多智能体系统中大规模合作学习
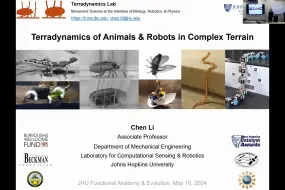
复杂环境中的机器人运动
家庭通用机器人
开源通用机器人构建
字节万级GPU集群LLM训练
Robotics in the Age of Generative AI
昆虫规模机器人的自主性
Centauri:通过通信分区实现大型模型训练中通信计算重叠的高效调度
利用生物执行器机制实现软体机器人
MIT机器人操作Lecture 2
Databricks Data + AI Summit 2024 主题演讲1
足式机器人的视觉全身操控与运动
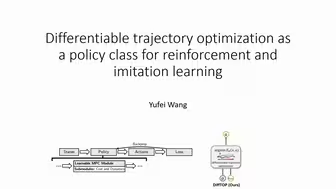
可微轨迹优化作为强化和模仿学习的策略表示
SynH2R:合成的手-物体运动以学习人机间物体传递
通过扩散策略进行机器人灵活操作
机器人中的数值方法
GPT-4V应用于机器人视觉语言规划
构建内部摆线型机器人执行器
通过第一人称视频进行机器人学习
数字实验室做机器人及模拟机器人开发
通过语言、逻辑和YouTube视频数据实现长期操作的可扩展机器人学习
SMUG Planner:一种适用于移动机器人在复杂环境中的安全多目标规划器
非稳态环境中的安全RL:理论与算法