V
主页
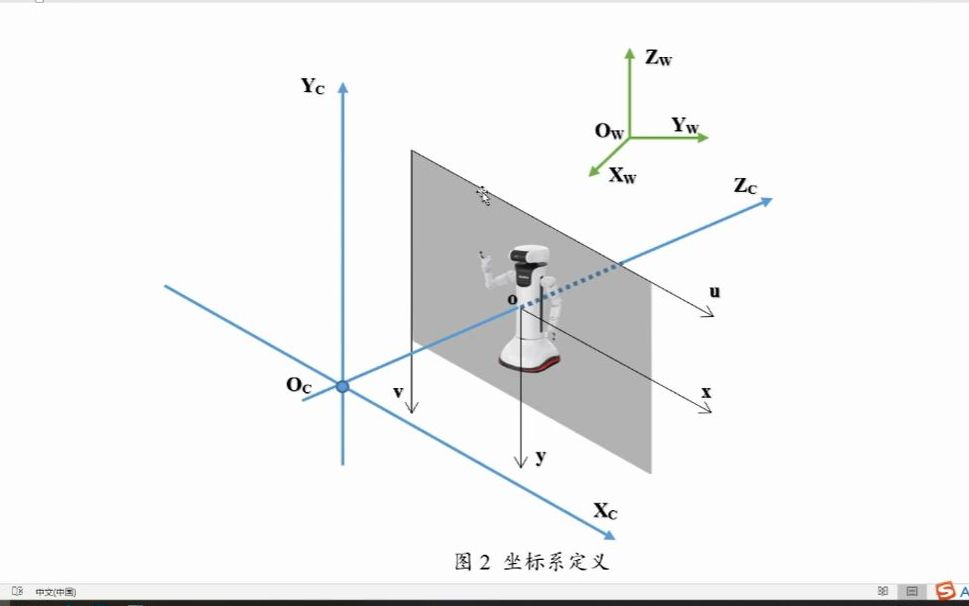
AI专场-相机内参标定实验原理讲解
发布人
相机标定(Camera calibartion)是机器人视觉进行目标定位跟踪的首要环节,通过标定好相机的内外参数,进行后续的定位识别工作。 本实验需要使用打印的棋盘图像,使用待标定的相机采集棋盘图像,完成获取摄像机的内参矩阵。 讲解老师:尚唯坚 清华本科 哈佛大学博士后 创业公司CTO
打开封面
下载高清视频
观看高清视频
视频下载器
相机标定:原理+实战
AI专场-人脸识别系统实验原理讲解
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
AI&机器人需要掌握哪些关键技术
AI专场-移动机器人导航实验原理讲解
【人工智能】太吓人!GPT-4o语音功能莫名发出尖叫!
地表最强AI写代码工具——Cursor:人人都是P8程序员
维度学院 机器视觉60讲 第二章 相机标定
AI专场-六轴手臂规划实验原理讲解
相机标定老大难问题——畸变矫正不准确怎么办?
【杀戮尖塔】故障机器人闪电鞭教程(迫真)
手把手教你用YOLOv8训练自己的数据集(原理解析+代码实践)
华五毕业,ai工程师,重度焦虑抑郁,每天都有濒死感,谈谈我的职场经历。不是我不想努力
【白嫖】PMSM永磁同步电机参数辨识仿真模型
今天拍摄一下手办机器人,让大家看看
发明这个机械夹持机构的真是牛得冒烟啦苹果生产用
【开源自动驾驶小车】低成本DIY自动驾驶的智能小车
【AI女友】全网最强无限制,尽情享受!
2024年广东省工程实践与创新能力大赛,初赛,B37,2024年7月27日
陶哲轩在2024年国际数学奥林匹克(IMO)的演讲:AI 与数学
怎么解决 ?在线等 急!#偷吃#人机
“保持热爱 共赴山海”河北工业大学 山海机甲战队2024赛季总结暨纳新宣传视频
浙江大学第四代表情机器人“小瑶”,这你受得了吗?
反骨装修!不听老人言,幸福享不完
我们训练了一个没有道德限制的大模型
离谱!让支付宝免费给你当牛马!
做了一个时速超过一百每小时的扫地机器人
分享一个有不错的精度跟负载能力,但成本只要几十块的机器人双轴手腕结构…
零成本升级成AI电脑,这些活AI帮你干了。
又火了!SDV4.9+flux大模型炸裂大更新(附秋叶SD全套超强整合包+超强模型整合包)yyds 感谢秋枼大佬!sd安装教程 Stablediffusion
2024年超好用的九大AI工具!免费且强大!(下集)
Andrej Karpathy:大模型10亿参数就够了,蒸馏技术效果非常好!
四妹被我推到啦!
人机战士最逆天的一集
我有一个梦想,做出刀剑神域爱丽丝那种机器人,刀剑爱丽丝,爱丽丝
【硬核解析】从GPGPU到CUDA,看完秒懂GPU为何主宰AI !(GPU渲染管线工作原理大揭秘)!!
人类是AI的“原生家庭”?AI是人类的“末日审判”?严谨逻辑逐帧推演人类未来。推理数字生命起源,与拯救人类的唯一方法。
AI刘涛换脸AOA申惠晶——《短裙》(3)
维度学院 机器人运动学60讲 第一章 位姿描述与坐标变换
宇树科技的竞争对手 | 中国深圳机器人公司 | 逐际动力 | 融资超2亿元 | 开发3款机器人产品 | 了解逐际动力 怎能错过这个视频 | 云深处科技