V
主页
相机标定老大难问题——畸变矫正不准确怎么办?
发布人
相机标定在自动驾驶中具有重中之重的作用,那如何提升相机标定呢?今天和大家一起分享一下。 分享人:路飞,自动驾驶之心前沿技术研究团队成员,曾在头部自动驾驶公司工作多年,有多年的自动驾驶算法研发和项目交付经验。在IROS,ICRA,RA-L,SIGGRAPH,TVCG等机器人、计算机图形学领域发表多篇论文,在自动驾驶传感器标定、SLAM、模型优化方面有着丰富的研究和项目交付经验。 ————内容来自《面向工程和量产级的相机标定与实战教程(就业班)》:https://wrzpl.xetslk.com/s/3prL31
打开封面
下载高清视频
观看高清视频
视频下载器
搞懂了!原来激光雷达和相机的内外参是这样标定的
ICRA2023 | 激光雷达相机内外参联合标定方案!
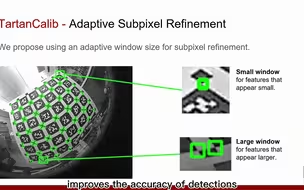
开源广角相机标定!TartanCalib:基于AprilTags自适应亚像素细化的迭代广角镜头标定(卡内基梅隆大学)
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
特斯拉的World Model是什么?怎么做端到端训练?
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
端到端算法是什么?自动驾驶领域是怎么做的?
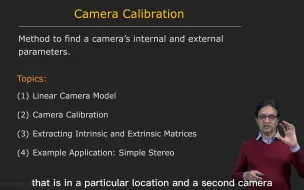
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
实战超详细!Radar、Lidar和前置Camera的标定
什么是端到端自动驾驶?什么是基础world model?
端到端自动驾驶:SparseDrive 算法详解
自动驾驶中的多传感器融合状态估计如何建模?
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
自动驾驶汽车是如何在高精地图中建立精确位置的?
数据为王!自动驾驶开源数据体系现状与未来
端到端基础!绕不开的感知模块
端到端趋势下,传统规控还有未来么?
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
ICRA2021 | 多相机激光雷达的外参标定(基于目标姿态估计)
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
一文尽览:自动驾驶大语言模型应用综述分享
视觉3D检测如何做自动标注?
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
香港科技大学最新!MARC:自动驾驶的多极和风险意识应急计划
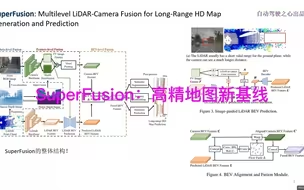
SuperFusion:高精地图新基线
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
透彻!特斯拉occupancy network详解
使用概率深度补全的3D激光雷达重建(IROS2022)
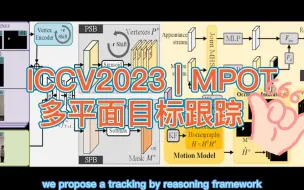
ICCV2023 | MPOT:多平面目标跟踪
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
从0到1!彻底搞懂BEVFormer算法原理