V
主页
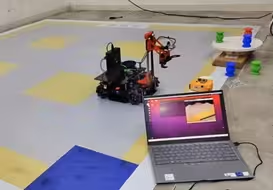
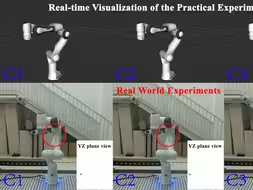
IR-VIO Illumination-Robust Visual-Inertial Odometry Based on Adaptive Weighting
发布人
Z. Song, X. Zhang* , T. Li, S. Zhang, Y. Wang, and J Yuan. IR-VIO: Illumination-robust visual-inertial odometry based on adaptive weighting algorithm with two-layer confidence maximization, IEEE/ASME Transactions on Mechatronics (T-MECH), 2023, 28(4): 1920-1929. ( https://ieeexplore.ieee.org/abstract/document/10143805/ ) Abstract: Illumination change, image blur, and fast motion dramatically decrease the performance of visual-inertial navigation systems (VINS). This article presents a new illumination-robust visual-inertial odometry (IR-VIO) based on adaptive weighting algorithm with two-layer confidence maximization. First, to prevent the VIO performance degradation caused by poor image quality in complex scenes and ignoring the confidence differences of feature points, we develop a novel adaptive weighting algorithm on the multisensor layer and visual feature layer to better fuse multisensor information and maximize the overall confidence of VIO. Second, to solve the problems of image feature tracking difficulty and excessive image noise in illumination-changing scenes, an image enhancement algorithm is introduced to enhance consecutive images to the same brightness level, while a block noise removal algorithm with constraint protection mechanism is proposed to dynamically remove noise points. Finally, experimental results in the public dataset and real-world environments demonstrate that IR-VIO has superior performance in terms of accuracy and robustness compared with the state-of-the-art methods.
打开封面
下载高清视频
观看高清视频
视频下载器
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
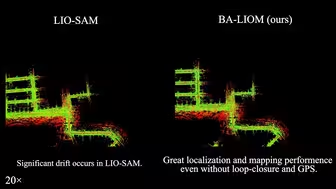
BA-LIOM: Tightly-coupled Laser-Inertial odometry and mapping with bundle adjustm
Incremental 2-D line segment-based mapping
MRPB 1.0: A unified benchmark for the evaluation of mobile robot local planning
TC2LI-SLAM: A Tightly-Coupled Camera-LiDAR-Inertial SLAM System
SFRE: Safe and Fast Robotic Exploration for 3D Uneven terrains
【IEEE RAL2024代码最新开源: 崎岖地形具有“大区域意识”的安全快速探索策略LRAE】
Fast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on
CURE- A Hierarchical Framework for Multi-Robot Autonomous Exploration(Video_2)
机器人和人类比赛煎牛排(Neo 1x)
RobotKeyframing:四足机器人学习高层次目标的运动|2024【迪士尼】
这可能是B站最全面的【3D点云+三维重建】教程!原理解读+实战分析,迪哥带你一口气学完!计算机视觉
CURE- A Hierarchical Framework for Multi-Robot Autonomous Exploration(Video_1)
禁止低效啃书!《清华高翔博士-视觉SLAM14讲》视频教程全集,简直不要太强!
原来机器人中也有“人贩子”一个机器人拐跑一大批机器人 #智能机器人 #智能AI #离谱
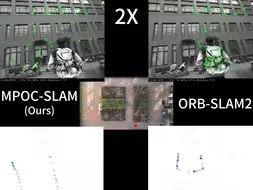
MPOC-SLAM: an RGB-D SLAM system with motion probability and object category in
超全超简单!一口气刷完YOLO、SSD、Faster R-CNN、Fast R-CNN、Mask R-CNN、R-CNN等六大目标检测常用算法!真的比刷剧还爽!
李飞飞:斯坦福计算机视觉公开课
强推!OpenCV+YOLO 实时目标检测实战教程,最详细的学习路线+技能介绍,毕设成功拿下!(深度学习丨计算机视觉丨YOLO丨OpenCV | 人工智能)
全网最低成本—具身智能机械臂+实操课程
Target-Free and User-Friendly online extrinsic calibration of LiDAR-IMU-Camera s
斯坦福李飞飞终于把【计算机视觉】给讲明白了!全程16集,草履虫都能听明白!深度学习cs231n公开课【中英字幕】
这绝对是全网最全的Transformer,VIT/Swin/DETR模型全详解,迪哥3小时带你吃透Transformer模型!
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
尤瓦尔·赫拉利对谈张静初:AI正在制造慢不下来的人
【强推】2024最完整版从入门到精通一口气学完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络!这不比刷剧爽多了!
计算机视觉-OpenCV入门讲解!从配置安装到项目实战,迪哥带你3小时快速上手!
2025年工创赛 工程训练大赛 智能+赛道 智能物流搬运机器人
谁能想到自动驾驶最大的威胁居然是来自人为?
(CVPR 2024)即插即用多尺度注意力机制MAB模块,即用即涨点起飞
警察楼子门口拍女警机器人。很久没cos机器人上街了,想着星际小美这套能暖和来着,结果……真夏天热她热,冬天冷她冷啊!
图像分割入门到进阶!一口气学完CNN、RNN、GAN、PyTorch、OpenCV和Python等深度学习必备基础!存下吧,真的没有比这还详细的教程了……
【共150集】这才是科研人该学的人工智能教程!一口气学完python基础+机器学习算法+深度学习神经网络,项目讲解太通俗易懂了,草履虫都能学会!
Newly added: An Enhanced Framework for Fast Trajectory Recovery under IVDs
【yolov8】一小时掌握!从0开始搭建部署YOLOv8,环境安装+推理+自定义数据集搭建与训练,入门到精通!
目前B站最完整的【图神经网络从入门到精通】讲解,我居然20小时就学懂了GNN原理模型与应用,纯干货!超详细!看完血赚!神经网络深度学习/AI 人工智能
目标检测领域必须掌握的算法:YOLOV1~V11目标检测算法原理详解+源码复现教程,一个合集全部到位!比刷剧爽多啦!
我愿称之为【计算机视觉入门教程】天花板!12讲从入门到实战,全程通俗易懂,都是干货!!!(计算机视觉图像处理/人工智能)
云深处全地形越野机器人:四轮越野攀岩,轻松翻越巨石,直行倒立,快如闪电,稳如老狗!
yolov11&pyside6目标检测可视化界面系统