V
主页
CURE- A Hierarchical Framework for Multi-Robot Autonomous Exploration(Video_2)
发布人
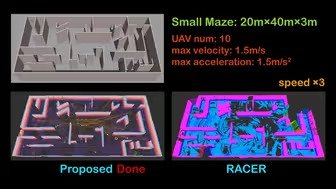
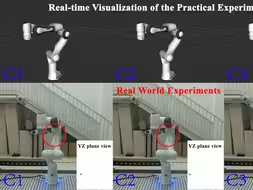
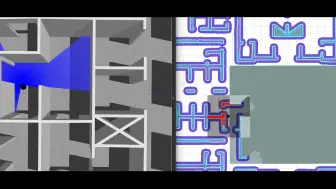
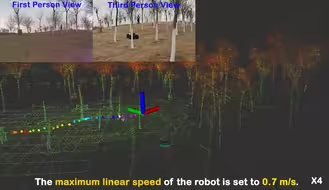
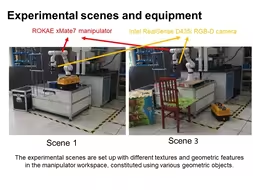
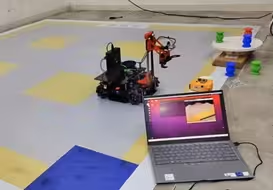
Q. Bi, X. Zhang* , J. Wen, Z. Pan, S. Zhang, R. Wang, and J Yuan. CURE: A hierarchical framework for Multi-Robot autonomous exploration inspired by centroids of unknown regions, IEEE Transactions on Automation Science and Engineering (T-ASE) , 2023. ( https://ieeexplore.ieee.org/abstract/document/10155622/ ) Abstract: In this paper, a novel multi-robot autonomous exploration approach CURE is proposed based on dynamic Voronoi diagrams and centroids of unknown connected regions. Compared with existing approaches, the novelty of this work is twofold: 1) Dynamic Voronoi diagram is used for partition of the space being explored to improve the efficiency of multi-robot exploration, and then a new parameter-insensitive utility function is elaborately designed to evaluate the information of centroids, which helps guide the robot to explore unknown regions. 2) A hierarchical framework consisting of global and local exploration windows for detecting centroids is designed, wherein the global exploration window is activated to find centroids to guide the robot exploration when there are no centroids in any one local exploration window. We validate the feasibility and exploration efficiency of the proposed approach in various complex simulation scenarios and challenging real-world tasks. All test results show that the exploration time consumption and path cost are reduced by up to 50.7% and 34.4%, respectively, compared with an advanced RRT-based multi-robot exploration approach. Note to Practitioners —This paper is motivated by the efficient multi-robot autonomous exploration problem. In some applications such as target search and disaster rescue, the information about the environment is totally unknown to the robots, and thus they are required to explore unknown environments autonomously.
打开封面
下载高清视频
观看高清视频
视频下载器
Fast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on
SFRE: Safe and Fast Robotic Exploration for 3D Uneven terrains
CURE- A Hierarchical Framework for Multi-Robot Autonomous Exploration(Video_1)
Newly added: An Enhanced Framework for Fast Trajectory Recovery under IVDs
MRPB 1.0: A unified benchmark for the evaluation of mobile robot local planning
【IEEE RAL2024代码最新开源: 崎岖地形具有“大区域意识”的安全快速探索策略LRAE】
TMPU: A Framework for Terrain Traversability Mapping and Planning in Uneven and
SGS-Planner: A skeleton-guided spatiotemporal motion planner for flight in const
IR-VIO Illumination-Robust Visual-Inertial Odometry Based on Adaptive Weighting
MPOC-SLAM: an RGB-D SLAM system with motion probability and object category in
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
An Enhanced Framework for Fast Trajectory Recovery under IVDs
BA-LIOM: Tightly-coupled Laser-Inertial odometry and mapping with bundle adjustm
TC2LI-SLAM: A Tightly-Coupled Camera-LiDAR-Inertial SLAM System
LLM-PySC2:LLM starcraft II learning environment 基于pysc2的大语言模型星际争霸2决策仿真训练环境
Incremental 2-D line segment-based mapping
笨笨,给大家打个招呼~
全网首发,20届智能车完赛视频
CoRL现场有个发包包的显眼包
【原子之心】偷袭失控的女机器人
全网最低成本—具身智能机械臂+实操课程
【机器人之梦&LA LA LAND】|反复梦见的人,还会重逢吗
原来机器人中也有“人贩子”一个机器人拐跑一大批机器人 #智能机器人 #智能AI #离谱
南方科技大学发明的类生物四足机器人,够酷!
无限逼近人类身体构造,人工肌肉驱动的类人机器人Torso登场
2030年:当最强AI和最强机器人结合,会发生什么?
High-Accuracy Pose Estimation for 3D Reconstruction Considering the Manipulator
“巴布”特种机器人
你温柔一点啊,我心疼😭
万物均可集群,北方工业在中国航展宣传片展示的四足机器人集群
机器狼来了云深处重磅发布全新轮足机器狗,国内云深处首次把轮子和腿结合,使得机器狗性能直线飙升!越野性能炸裂。#山猫机器狗 #机器狼 #云深处 #国产机器狗
展会遛狗:激动的心、并不颤抖的手
大三专科生,勇闯工训赛,限制三分钟完赛,已经调成极限,在线求大佬指点,谢谢
2025年工创赛 工程训练大赛 智能+赛道 智能物流搬运机器人
RobotKeyframing:四足机器人学习高层次目标的运动|2024【迪士尼】
老龄单身时代,电子仿生人能解决人的身心需求么?【千本科幻】
赛博朋克东南大学?“CYBATHLON2024”半机械人仿生奥运会夺冠!全程回顾
外形好似溜溜球——手抛式自走型侦察球
纪录片《消失的机器人》
马里奥步兵